New Underwater Drone Prowling Coastal Waters
Eric Olson | November 07, 2018A new underwater drone for a variety of environmental survey and military applications in coastal waters is now available. The Bluefin-9 Unmanned Underwater Vehicle (UUV) from Bluefin Robotics (part of General Dynamics Mission Systems) is equipped with a variety of sensors to carry out survey, mapping and detection missions autonomously.
 Weighing 70 kg, the Bluefin-9 Unmanned Underwater Vehicle can be quickly deployed and recovered by a two-person team. Source: General Dynamics
Weighing 70 kg, the Bluefin-9 Unmanned Underwater Vehicle can be quickly deployed and recovered by a two-person team. Source: General Dynamics
The 70 kg vehicle is easily deployable with a two-person lift capability provided by carrying handles mounted at the nose and aft of the two-and-a-half-meter long, quarter-meter diameter vehicle.
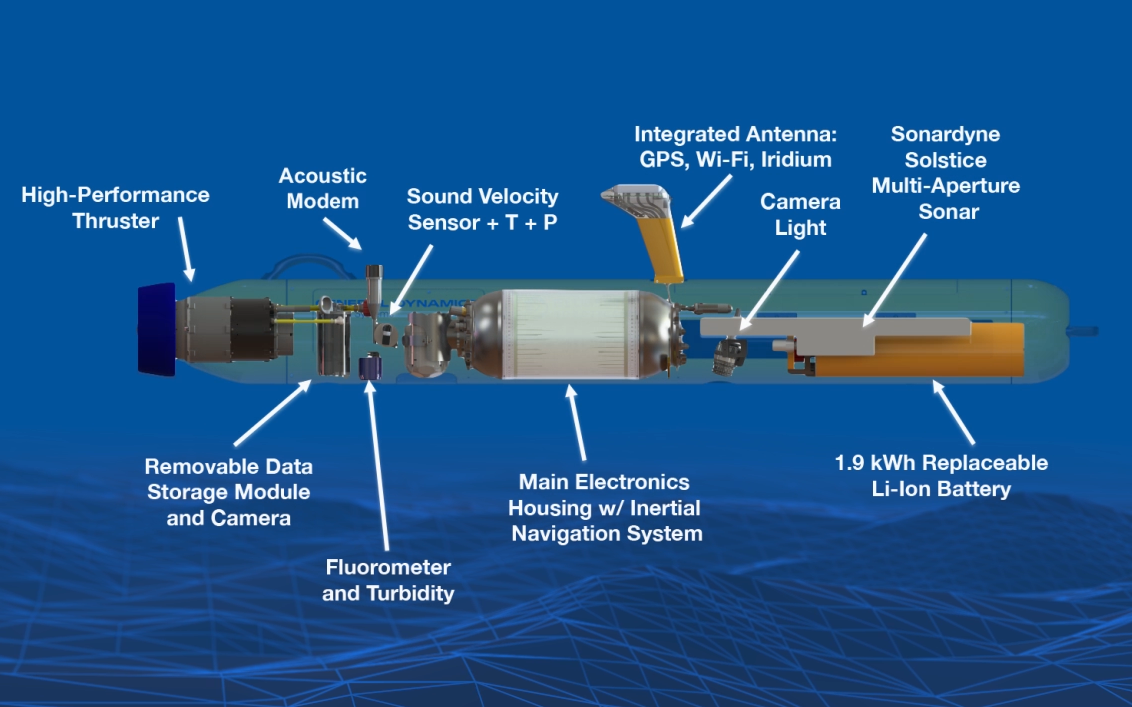
In rivers, lakes or oceans, Bluefin-9 remains buoyant in salt water as well as freshwater and can descend to a maximum depth of 200 m. Its rechargeable 1.9 kWh li-ion battery provides up to eight hours of operation at an average speed of 3 knots (kt). Once depleted, the battery is designed to be quickly swapped and can be fully recharged in six hours. A ducted thruster mounted on a gimbal propels the vehicle at a maximum transit speed of 6 kt and a top speed of 5 kt during surveys.
Bluefin-9 is ideal for a wide range of applications in littoral waters including hydrographic mapping, environmental protection and monitoring surveys, and rapid environmental assessments (REA). The UUV is also well suited for defense missions such as port and harbor security, mine countermeasure (MCM), and intelligence, surveillance and reconnaissance.
Navigation
 Bluefin-9 is equipped with a variety of off-the-shelf sensors from the commercial market that produce high quality data for hydrographic surveys. Source: General Dynamics
Bluefin-9 is equipped with a variety of off-the-shelf sensors from the commercial market that produce high quality data for hydrographic surveys. Source: General Dynamics
Precision navigation is provided by an inertial navigation system aided by a Doppler velocity log (DVL-aided INS) geo-referenced using a GPS receiver when the vehicle is at the surface. Navigation error is less than 0.3% of distance traveled (DT) with a circular error probability (CEP) of 50% (0.3% DT CEP 50). This means that for at least 50% of trips, the vehicle will end up in a location whose actual physical coordinates are contained within a sphere centered on the navigation plan’s intended coordinates that have a radius equal to 0.3% of the distance traveled.
[Find out how UUVs navigate autonomously on Engineering360.]
Sensor Suite
Bluefin-9 is equipped with an array of sensors to gather environmental and bathymetric data. (Bathymetry is the underwater equivalent of topography; bathymetric charts show the depth of ocean floors.)
The UUV’s Sonardyne Solstice 3000 multi-aperture sonar delivers high-resolution images of the sea floor. It also consumes much less power than traditional side-scan synthetic aperture sonar (~20 W compared to hundreds of watts), improving endurance underwater and allowing the vehicle to carry out longer missions before power is depleted. The sonar has a wide swath range (coverage width along the sea floor) of 200 m and excellent azimuth beam-width of 0.15 degrees, delivering very high resolution along the track. The sonar generates clear images with multibeam elements that dynamically focus at each pixel in the image, adjusting for the nonlinear rolls, pitches and yaws that distort conventional sonar images.
 Bluefin-9’s multi-aperture side-scan sonar images a wide swath of the sea floor at high resolutions. Source: General Dynamics
Bluefin-9’s multi-aperture side-scan sonar images a wide swath of the sea floor at high resolutions. Source: General Dynamics
A turbidity and fluorometer sensor measures the amount of suspended solid matter in the water (turbidity), as well as the quantity of chlorophyll in the water, by its fluorescence. The sensor will help evaluate regions of high turbidity, which can be caused by, for example, high runoff from rivers or blooms of phytoplankton. When turbidity readings are high, the fluorometer distinguishes between phytoplankton and non-phytoplankton matter by measuring the intensity of fluorescence generated by the chlorophyll in phytoplankton. For example, low fluorescence but high turbidity readings would indicate that most of the suspended matter is not phytoplankton.
[Discover turbidity instruments and learn more about them on Engineering360.]
Bluefin-9 is also equipped with an integrated sound velocity, temperature and pressure sensor. This instrument gathers information on water currents and indicates the vehicle’s depth according to the linear relationship between pressure and depth. Data from the sensor can also be used to calculate the amount of salt dissolved in the water since salinity can be expressed as a function of sound velocity, temperature and depth.
 Bluefin-9’s integrated GPS/Wi-Fi/Iridium antenna also has a visible strobe light. Source: General Dynamics
Bluefin-9’s integrated GPS/Wi-Fi/Iridium antenna also has a visible strobe light. Source: General Dynamics
A removable data storage module (RDSM) processes and stores up to one terabyte of data from the vehicle’s suite of sensors. A high-definition camera in the RDSM records monochrome video and images tagged with geographic information for later reference.
Protruding from the top of the UUV is an integrated antenna that enables communications over Wi-Fi and the Iridium satellite constellation and receives GPS signals when the vehicle is at the surface.
[Discover antennas and learn more about them on Engineering360.]
Vehicle and mission status is easily monitored with the Bluefin Dashboard software, which automatically switches to the communications channel with the highest bandwidth. The Bluefin Planner allows operators to build simple or complex mission plans in a graphical, chart-based tool including custom navigational paths and safety constraints.



