How Do Unmanned Underwater Vehicles Navigate Autonomously?
Eric Olson | November 19, 2018GPS does not work underwater. The signals from orbiting GPS satellites can’t penetrate below the surface. So how do submarines find their way in the ocean’s depths?
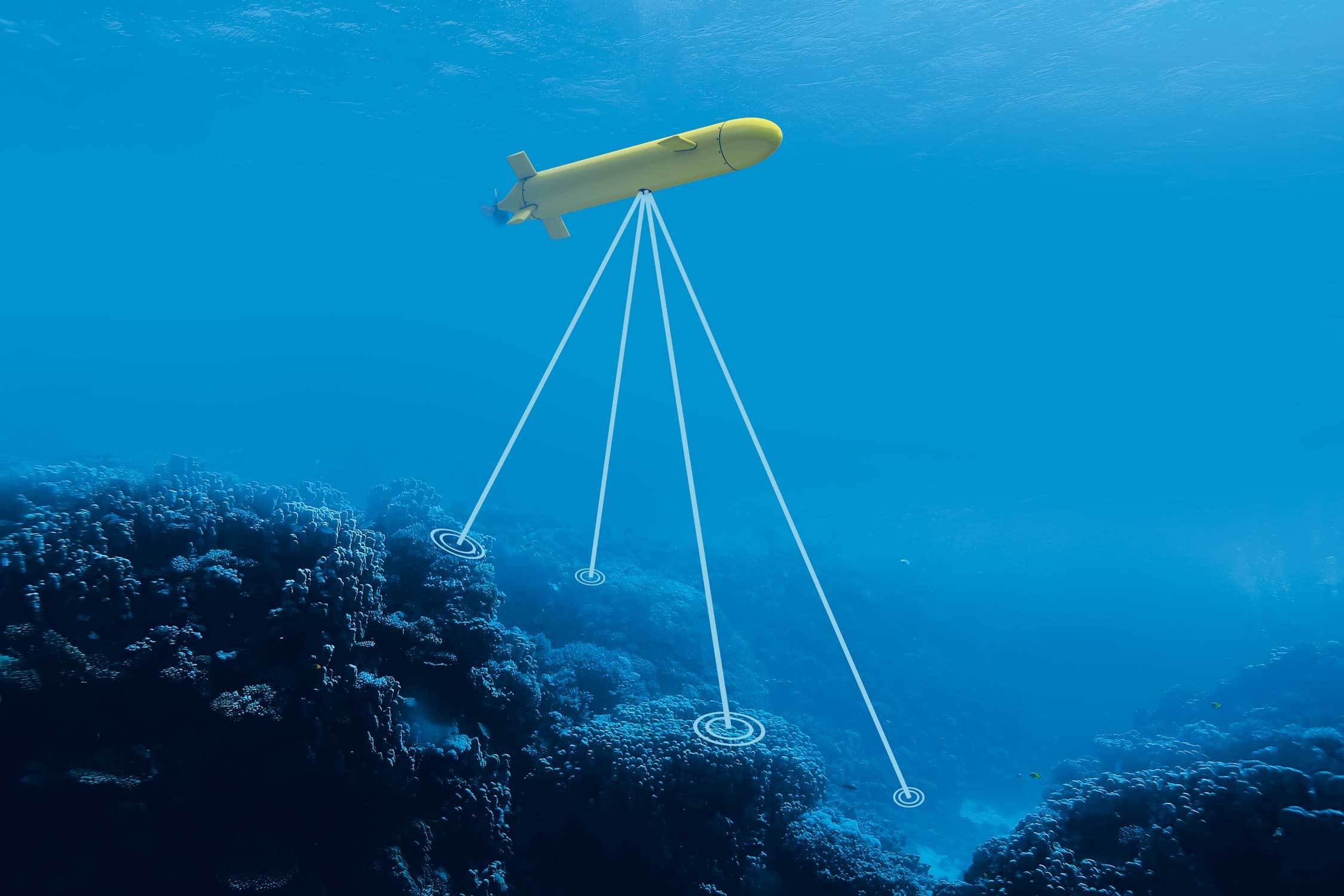
 Autonomous underwater vehicles must utilize tools other than GPS to navigate below the surface. Source: ECA Group
Autonomous underwater vehicles must utilize tools other than GPS to navigate below the surface. Source: ECA Group
Unmanned underwater vehicles (UUVs) navigate autonomously when submerged by relying on a suite of instruments to establish vehicle location and trajectory. Before diving below the surface, a reading from the vehicle’s GPS receiver establishes the vehicle’s initial position with high precision. Once underwater, other instruments take the lead, including an inertial navigation system (INS) and a Doppler velocity log (DVL). Position, speed and heading information from these instruments is continuously fed to a navigation computer. This unit plots the vehicle’s route and sends control signals to motor controllers to precisely modulate thruster power and direction, providing the correct amount of propulsion to keep the vehicle on track.
[Take a closer look at a UUV: Bluefin-9.]
Inertial Navigation System
The INS computes the heading and speed of the vehicle based on measurements from its internal inertial measurement unit (IMU). The IMU contains accelerometers and gyroscopes that measure linear accelerations and angular velocities along all three axes. Processing this data through navigation algorithms, the INS calculates the vehicle’s relative position, orientation and velocity.
Relying on the INS alone for navigation, however, would lead the vehicle astray over long distances. This is because the INS is prone to stacking errors in its calculations. To determine the distance traveled, the INS integrates acceleration (a) over time (t) to get velocity (v) and then integrates velocity over time to determine displacement (x):
At each step in this double integration process, the small error and drift inherent in the INS’s relative navigation calculations is magnified, growing quadratically over time.
[Discover inertial navigation systems and learn more about them on Engineering360.]
Doppler Velocity Log
 A Doppler velocity log sends out acoustic beams toward the sea floor and determines the vehicle's velocity based on the Doppler effect. Source: Nortek
A Doppler velocity log sends out acoustic beams toward the sea floor and determines the vehicle's velocity based on the Doppler effect. Source: Nortek
To reduce the bias and offsets baked into pure INS calculations, velocity data from a DVL is incorporated into the solution. The DVL is an acoustic sensor that determines the vehicle’s velocity relative to the sea floor. It does this by sending out sound beams and measuring the frequency shift of the echoes reflected from the sea bottom. This change in frequency is a result of the Doppler effect, which causes the frequency of sound waves to shift when there is relative motion between the sensor and the sea floor. When the vehicle is moving toward the reflected echoes, the sound waves appear to compress, resulting in a higher frequency measured at the sensor. This shift in frequency is proportional to the velocity of the vehicle.
Combined with INS readings, DVL velocity values reduce excessive drift in the navigation solution. This is because a DVL provides a more direct measurement of velocity compared to the INS, which integrates acceleration over time to calculate velocity. Since the mean velocity bias of a DVL is zero, plugging its data into the navigation solution along with INS measurements reduces error growth over time.
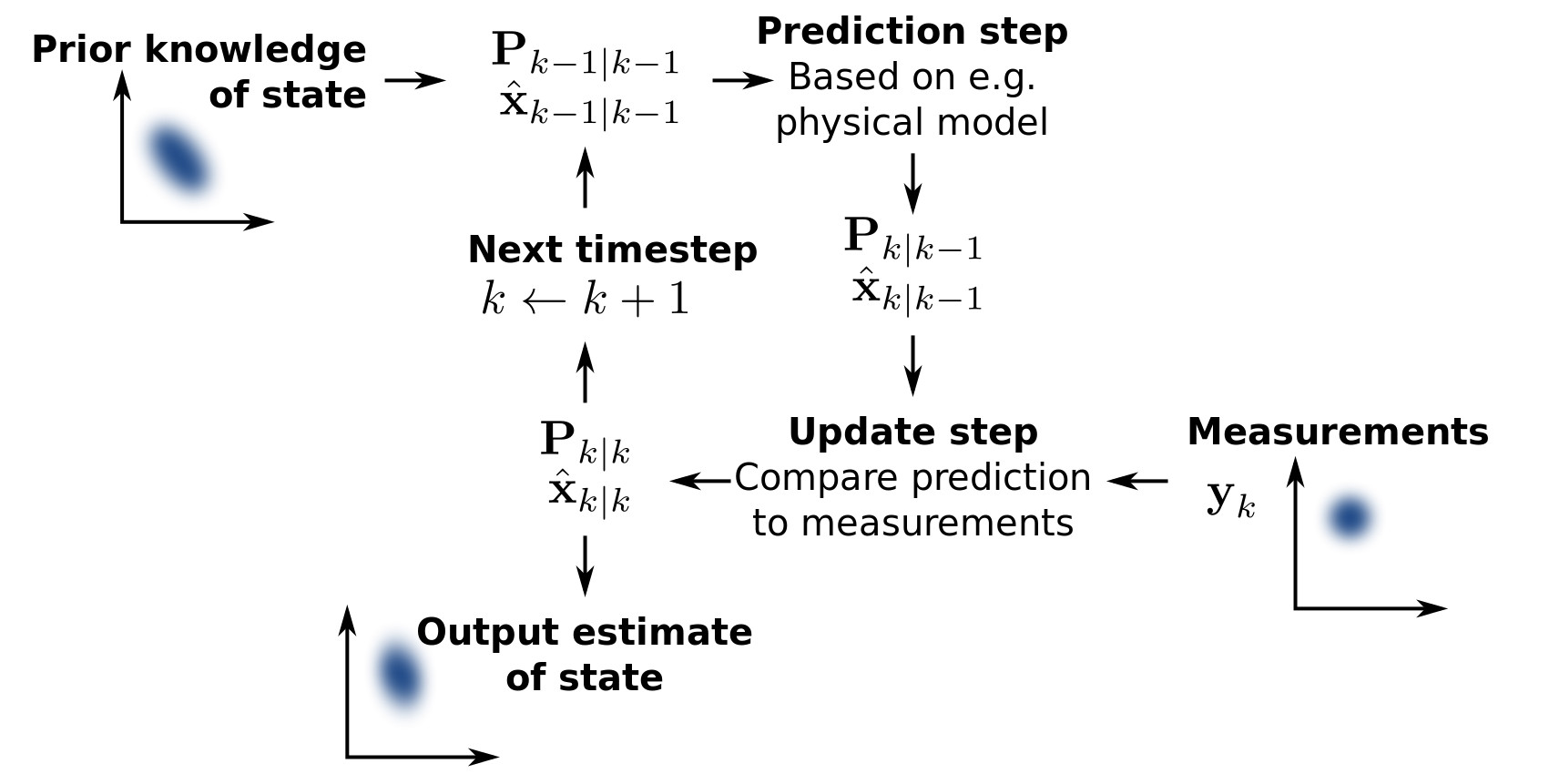 A Kalman filter calculates a solution using a weighted average of instrument measurements and a model-based prediction. Kalman Filter
A Kalman filter calculates a solution using a weighted average of instrument measurements and a model-based prediction. Kalman Filter
The final navigation solution joins data from each of the instruments (GPS, INS and DVL) to produce the most accurate vehicle position. A common approach to achieve this involves processing the data in an algorithm known as a Kalman filter. This type of algorithm generates an estimate of the solution by averaging the actual instrument measurements along with a predicted solution based on a model of the physical system. The estimated solution is updated in an iterative process. In each iteration, the model predictions are updated with new instrument measurements using a weighted average, with the most weight assigned to values with the lowest uncertainty. The Kalman filter solution produced from the fusion of each of the instruments’ data is more accurate than the position calculated by the INS alone.
The navigation solution can be further improved using additional sensor measurements as inputs into the Kalman filter. Besides refining accuracy, extra sensor data makes the solution more robust in the event of instrument failures. Three possibilities for additional inputs are a pressure sensor, an attitude sensor and an acoustic long baseline (LBL) system.
The pressure sensor indicates the depth of the vehicle, providing corrective data for its z-axis coordinate. The attitude sensor produces tilt and magnetometer readings, delivering information on the vehicle’s roll, pitch and yaw. The LBL system determines the vehicle’s location through a process of triangulation by measuring the round-trip time for acoustic signals to travel between a transceiver on the vehicle and transponders on the sea floor.
[Discover pressure sensors and learn more about them on Engineering360.]
The readings from each of these instruments is processed through the Kalman filter, fusing GPS, INS and DVL data. The result is a very accurate navigation solution that does not drift over time, ensuring that the underwater vehicle knows its precise location, speed and direction at all times. With this information, the navigation computer is able to precisely control the vehicle’s propulsion to keep it on the desired path.
Further Reading
New to Subsea Navigation? | Nortek Wiki
Autonomous Underwater Vehicle Navigation | IEEE Journal of Oceanic Engineering



