Team powers robot leg with artificial muscles
Marie Donlon | September 09, 2024A new, energy efficient muscle-powered robotic leg capable of performing high jumps, fast movements and detecting and reacting to obstacles, has been developed by a team of researchers from ETH Zurich and the Max Planck Institute for Intelligent Systems (MPI-IS) via a research partnership called the Max Planck ETH Center for Learning Systems (CLS).
To create this new robotic leg, the team replicated the extensor and flexor muscle construction found in humans and animals, thus ensuring that the robotic leg can move in both directions, using electro-hydraulic actuators, dubbed HASELs, which are attached to the skeleton by tendons.
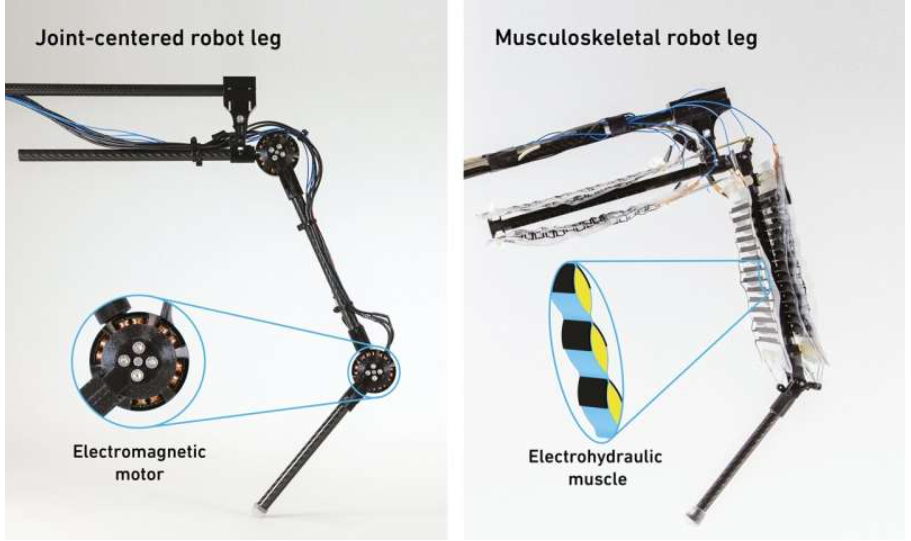 Source: Thomas Buchner/ETH Zurich and Toshihiko Fukushima/MPI-IS
Source: Thomas Buchner/ETH Zurich and Toshihiko Fukushima/MPI-IS
The researchers explained that the actuators are oil-filled plastic bags, with about half of each bag coated on either side with a black electrode composed of a conductive material.
"As soon as we apply a voltage to the electrodes, they are attracted to each other due to static electricity. Similarly, when I rub a balloon against my head, my hair sticks to the balloon due to the same static electricity," one of the team members explained.
As the voltage is increased, the electrodes come closer and force the oil in the bag to one side, thus shortening the bag.
When pairs of the actuators were attached to a skeleton, the researchers suggest that they could replicate the same paired muscle movements as in living creatures, wherein when one muscle shortens, the other will lengthen. A computer code was used to communicate with high-voltage amplifiers for controlling which actuators contract and which ones extend.
The team has compared the energy efficiency of the new robotic leg with that of a conventional robotic leg that was powered by an electric motor — specifically analyzing how much energy is converted into heat unnecessarily.
Looking at an infrared image, the team concluded that motorized leg consumed much more energy if it had to hold a bent position, for instance. Meanwhile, the temperature in the electro-hydraulic leg remained the same because the artificial muscle is electrostatic, the team added.
The team suggested that conventional electric motor-driven robots require heat management, which demands additional heat sinks or fans to diffuse the heat to the air, while the new system does not.
Further, electric motors require sensors to indicate the angle of the robotic leg, whereas the artificial muscle adapts to an appropriate position via interaction with the environment.
The team explained: "Adapting to the terrain is a key aspect. When a person lands after jumping into the air, they don't have to think in advance about whether they should bend their knees at a 90-degree or a 70-degree angle."
This principle applies to the robotic leg's musculoskeletal system. When the robot lands, the leg joint moves into an appropriate angle according to whether the surface is hard or soft.
The team’s findings are detailed in the article, “Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion,” which appears in the journal Nature Communications.
For more on this technology, watch the accompany video that appears courtesy of ETH Zurich and the Max Planck Institute.