A mini wireless robot can move through tubular structures
Marie Donlon | May 31, 2024A team of researchers from the Max Planck Institute for Intelligent Systems, Harbin Institute of Technology, and Hong Kong University of Science and Technology has created a new wireless miniature robot capable of moving through pipes and other tubular structures without having to rely on external sources of power.
According to its developers, the robot promises to help solve complex maintenance problems while simultaneously minimizing pipe damage.
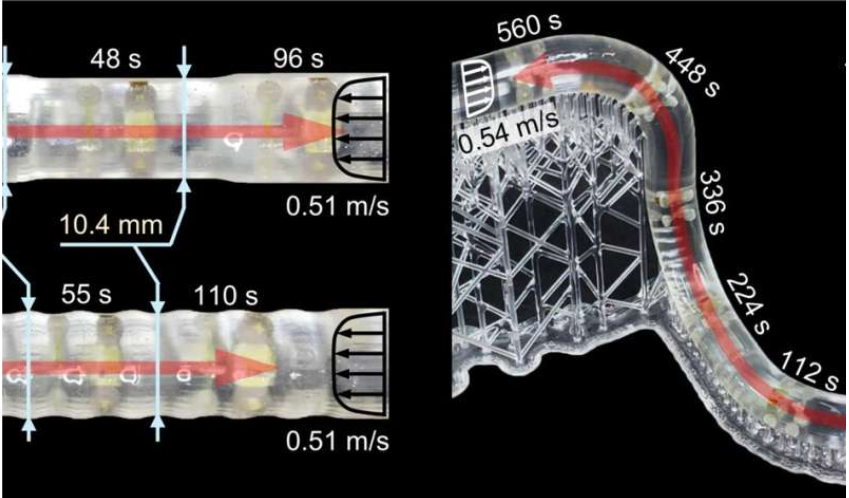 The robot's adaptive locomotion in pipes with changing inner diameter and complex 3D shape. Credit: Chong Hong and Yingdan Wu.
The robot's adaptive locomotion in pipes with changing inner diameter and complex 3D shape. Credit: Chong Hong and Yingdan Wu.
"Wireless millimeter-scale robots capable of navigating through fluid-flowing tubular structures hold substantial potential for inspection, maintenance or repair use in nuclear, industrial and medical applications," the researchers explained, "However, prevalent reliance on external powering constrains their operational range and applicable environments."
As such, the researchers sought to develop a wireless millirobot that includes an internal power source and an actuation unit, using its available energy in a controlled manner, thus enabling the millirobot to cover greater distances within tubular structures while performing routine maintenance tasks for extended periods of time, without running out of energy.
The researchers explained that the robot features three key components, including a flow-powering module for making use of flow power, a dual-output miniature gearbox for transmitting the converted mechanical energy into the robot's locomotion system and kirigami-inspired soft wheels for adaptive locomotion in complex tubes.
Thanks to these components, the flow-powered tube millirobot promises to provide controllable upstream and downstream long-distance navigation in complex pipelines for a variety of applications, the researchers added.
Further, the wheeled millimeter-scale robot also features an internal impeller that converts the flow of fluids in a tubular structure into mechanical energy, while the direction it is moving in can be modified by applying an external magnetic.
"Our robot addresses the needs of applications that demand long-distance navigation, as well as the ability to perform long-duration tasks within confined tubular structures that are filled with flowing gases or liquids," the researchers added.
The robot was evaluated during a series of tests with researchers reporting promising results.
An article detailing the robot, “Wireless flow-powered miniature robot capable of traversing tubular structures, appears in the journal Science Robotics.
For more on the robot, watch the accompanying video that appears courtesy of Hong Kong University of Science and Technology.



