Pump powers soft robots, makes cocktails
Diana Aoun | September 10, 2023Professor Robert Wood and his team at Harvard's John A. Paulson School of Engineering and Applied Sciences (SEAS) have developed a groundbreaking soft peristaltic pump based on dielectric elastomer actuators (DEAs), which holds the potential to revolutionize industries such as food handling, manufacturing and biomedical therapeutics through soft robotics.
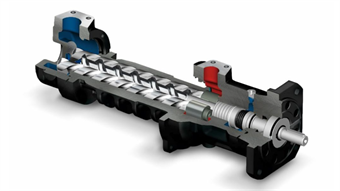
Soft robots have generally faced a challenge: how to replace bulky and rigid power components with more adaptable alternatives. This challenge has now been addressed by Wood's team with their innovative soft pump design. Traditional fluid-driven robotic systems rely on pumps to control liquid pressure and flow for movement, but existing options are often too rigid, underpowered or restricted to specific fluids.
 Source: Harvard Microrobotics Lab/Harvard SEAS
Source: Harvard Microrobotics Lab/Harvard SEAS
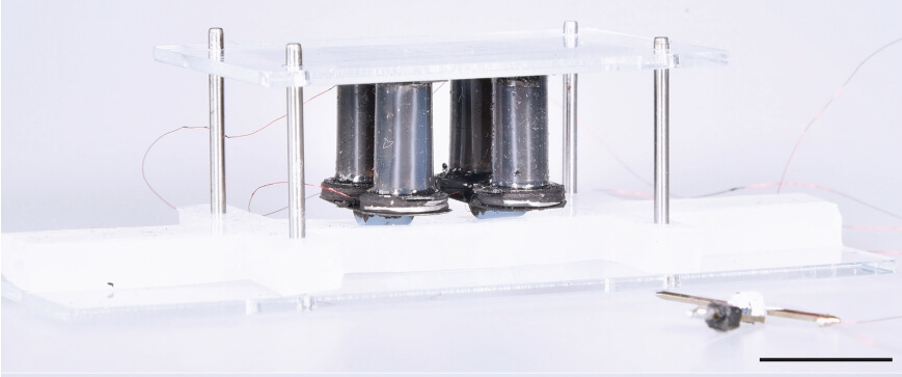
Wood's Microrobotics Lab has been at the forefront of developing soft alternatives for rigid robotic components, and their latest achievement is a compact, adjustable, and powerful soft pump. This pump can handle various fluids of different viscosities, from gin to juice to coconut milk. Its capabilities extend to powering soft haptic devices and robotic fingers.
The impact of this soft pump's size, power and versatility is significant. It paves the way for diverse applications of soft robots, from handling food and manufacturing to biomedical therapies. One of the crucial advantages of peristaltic pumps is that the liquid being transported never comes into contact with any pump components, making them ideal for sensitive applications such as in the medical field.
The innovation lies in the integration of electrically powered DEAs as the pump's motor and rollers. These DEAs are lightweight, have an ultra-high power density, with superior durability, and are capable of enduring hundreds of thousands of cycles. Through a coordinated array of DEAs, the pump generates pressure waves by compressing a tiny channel in a programmed sequence. This leads to the creation of a centimeter-sized pump, suitable for integration into soft robots. The pump's properties are controllable, including pressure, flow rate and flow direction.