Soft robotic hand can handle complex and fragile objects without causing damage
Siobhan Treacy | July 21, 2020Researchers from Michigan State University designed and developed a soft robot hand that can grip fragile and irregular objects. In industrial settings, these kinds of robots perform tasks that require repetitive grasping and object manipulation.
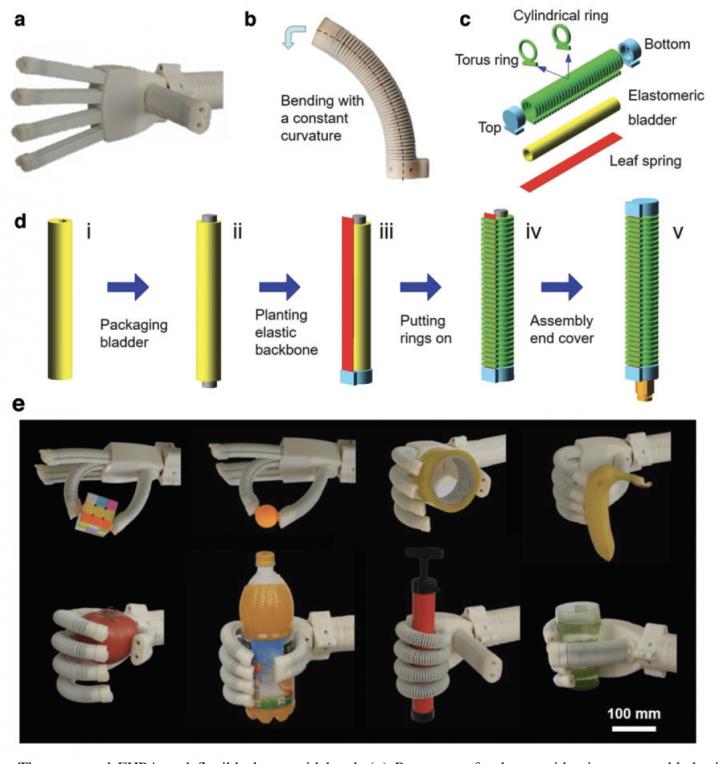 The novel humanoid hand design is a soft-hard hybrid flexible gripper that can generate larger grasping force than a traditional pure soft hand. Source: Changyong Cao
The novel humanoid hand design is a soft-hard hybrid flexible gripper that can generate larger grasping force than a traditional pure soft hand. Source: Changyong Cao
Today’s soft hand grippers have many disadvantages and weaknesses, including sharp surfaces, poor stability in grasping unbalanced loads and weak grasping force for heavy loads. This makes them unsuitable for some tasks like fruit picking or medical care.
The new design is a soft-hard hybrid flexible gripper. This gripper has a larger grasping force than a 100% soft hand and has more stability for accurate manipulation. The robot hand's fingers are constructed from a flexible hybrid pneumatic actuator (FHPA). FHPA is made of hard and soft components built around a structural combination of actuated air bladders and a bone-like spring core.
Pressurized air allows the hand's fingers to bend. The modular framework for movement allows the digits to move independently from the other digits. Traditional rigid grippers are made of simple and reliable rigid structures that can damage soft objects.
Today’s soft hand grippers have many disadvantages and weaknesses, including sharp surfaces, poor stability in grasping unbalanced loads and weak grasping force for heavy loads. The new soft humanoid hand has excellent adaptability and compatibility when grasping complex and fragile objects with a high level of stiffness and has strong clamping to lift heavy loads.
The team created a prototype that demonstrated the fast speed and agility of the new gripper. This gripper can handle many tasks that would traditionally require different types of grippers.
The team says that FHPA could be used for fruit picking, automated packaging, medical care, rehabilitation and surgical robots. They hope that they can combine the prototype with other work on developing “smart” grippers and help robots mimic human interaction.
A paper on this technology was published in Soft Robotics.



