Aerodynamics of multirotor drones
Jody Dascalu | March 08, 2022Multirotor drones, such as quadcopters, are dominating consumer VTOL (vertical take-off and landing) UAV (unmanned air vehicles) markets thanks to their ease of use and adaptability. When designing multirotor drones, aerodynamic interactions are important to consider. The size, shape and weight of the drone along with various characteristics of the drone’s propellers affect the drone’s flight characteristics.
 Figure 1. Quadcopter in flight.The main selling feature of multirotor drones is that they can take off and land vertically, meaning they can operate in tight spaces. Unfortunately, multirotor drones tend to consume a lot of power and have short flight times and ranges.
Figure 1. Quadcopter in flight.The main selling feature of multirotor drones is that they can take off and land vertically, meaning they can operate in tight spaces. Unfortunately, multirotor drones tend to consume a lot of power and have short flight times and ranges.
[Learn more about UAVs on GlobalSpec.]
Versus fixed-wing drones
Aerodynamics is a complex field of study, and there are key differences in multirotor drone aerodynamics. As well, there are similarities between multirotor and fixed-wing drone aerodynamics. Though fixed-wing drones have similar interactions that arise in airplane aerodynamics, while multirotor drones more closely resemble helicopter aerodynamics.
The forces differ due to fluid flow across the aircraft and how thrust is generated. Fixed wing drones tend to have one propeller and are designed more similarly to traditional aircraft.
Motor considerations
The motor of a multirotor drone is responsible for generating thrust. To achieve flight, the motors should produce around 50% more thrust than the weight of the UAV. This will help the drone fly in windy conditions and make steep turns.
There are two types of motors to choose from, brushed and brushless. Brushless motors offer more power and are suitable for heavier and larger drones.
The role of propellers
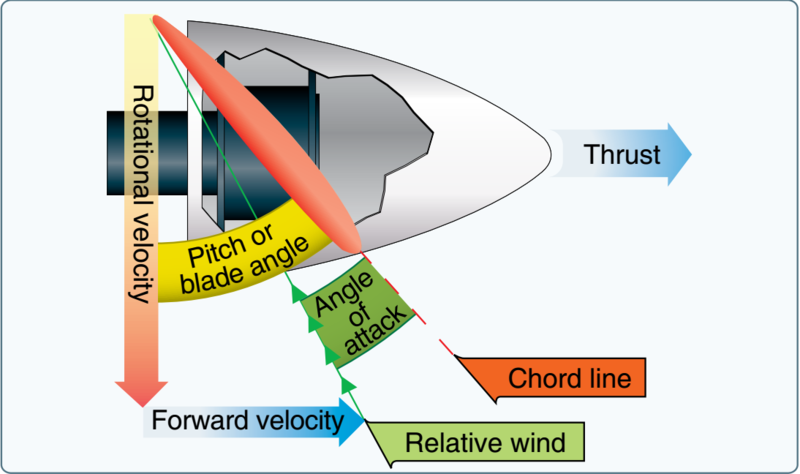 Figure 2. Propeller diagram.
Figure 2. Propeller diagram.
Propeller efficiency is based on the angle of attack. Efficiency is calculated as a ratio of the output and input power, with well-designed propellers having an efficiency of 80 percent.
Propellers can either be designed to spin clockwise or counterclockwise. In a quadcopter, two propellers spin counterclockwise and the other two spin clockwise. Otherwise, the quadcopter will yaw on itself and be uncontrollable. Quadcopters can be modelled as rigid bodies with six degrees of freedom.
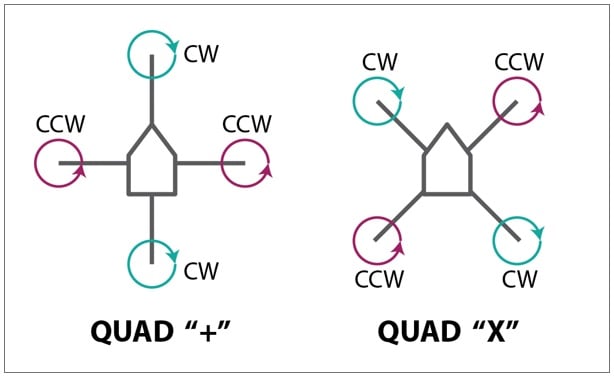 Figure 3. Quadcopter propeller direction for “+” and “X” configurations.The thrust generated by a propeller is directly related to the rotational speeds (revolutions per minute), air density, rotor diameter, shape, and rotor area, as well as its pitch.
Figure 3. Quadcopter propeller direction for “+” and “X” configurations.The thrust generated by a propeller is directly related to the rotational speeds (revolutions per minute), air density, rotor diameter, shape, and rotor area, as well as its pitch.
Propeller design considerations
A multi-rotor drone is an unmanned aircraft (UAV) that consists of multiple propellers that rotate around a central mast. There is a wide range of setups: three rotors, four rotors, six rotors, and eight rotors. There are also more unusual setups like 12 or 16 rotors. Of these, quadcopters with four rotos are one of the more popular setups.
1) Number of blades
Adding more blades means that there is more thrust being produced. However, each blade must travel through the wake of the one that came before it. That's why there is a limit to how many blades can be used in propeller design.
2) Diameter
Smaller diameters translate to less inertia and are easier to speed up and slow down, aiding in maneuverability. Drones with propellers of smaller diameters are typically used for acrobatic flight and racing; they are coupled with motors with high Kv ratings. Larger diameters are coupled with motors with low Kv ratings and can be used for greater payloads.
Larger propellers have more contact with the air and directly impacts flight efficiency. When hovering, larger propellers offer greater stability while smaller propellers are more responsive.
3) Pitch
This is the displacement per single revolution of the propeller. Lower pitch translates to higher torque and lower turbulence, which results in decreased power requirements from the motor. As a result, propellers with lower pitch values increase flight time and allow for heavier payloads. Conversely, propellers with higher pitch move more air per revolution but result in greater turbulence and less torque.
Multirotor drone flight
The resulting aerodynamic force depends on the relative magnitudes of four forces: weight, lift, thrust, and drag. Based on the resulting relative magnitude and direction of these four vectors, the drone will either climb, dive, or bank.
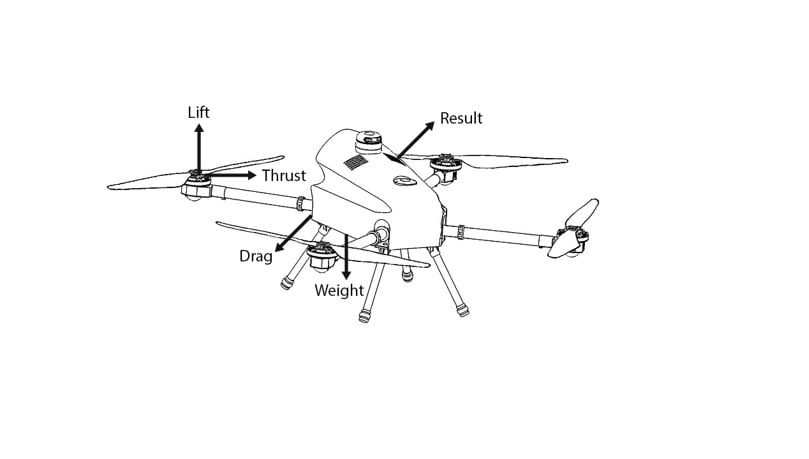 Figure 4. Quadcopter aerodynamic forces. Source: Medusami/CC BY-SA 4.0
Figure 4. Quadcopter aerodynamic forces. Source: Medusami/CC BY-SA 4.0
1) Weight
Weight is the force of gravity acting on the object, it is always directed toward the center of the earth. During flight, the weight rotates about the center of gravity. Flying a multirotor drone encompasses two major hurdles. First, the weight of the drone must be overcome by an opposing force. Second, the drone must be controllable in flight. The center of gravity is the point in an aircraft where the combined weight of the aircraft and its cargo is distributed evenly. The center of gravity and the drone's weight plays a major role in drone flight.
2) Lift
Lift is the force exerted on the drone by the air. It is the result of the interaction between the air and the drone. Lift is perpendicular to the flight direction.
The magnitude of the lift depends on the air density and the velocity of the drone. The greater the density of the air, the greater the lift force. The higher the speed, the greater the lift. The shape and size of the drone also contributes to the resulting lift force.
Lift acts through the center of pressure. This is the point at which the lift force and the weight of the drone are in equilibrium. When the drone is at rest, the center of pressure is directly under the center of gravity. When the drone is moving, the center of pressure moves with the drone. The location of the center of pressure changes as the drone changes direction.
Evidently, the performance of the drone is dependent on the position of the aircraft in the air, and, in turn, the distribution of the lift force is also especially important for controlling the aircraft.
3) Drag
The term drag is a generic term used to describe any force resisting the motion of an object through a fluid. It can be produced by a variety of mechanisms.
The drag of a body moving through a fluid is a force, acting in the opposite direction to the motion of the body, and causing a decrease in the velocity of the body.
Like lift, drag acts on the center of pressure and is dependent on the shape and size of the drone as well as the velocity.
For low-velocity flight, drag can be calculated by the below equation:
![]() Equation 1. Low-velocity drag formula.
Equation 1. Low-velocity drag formula.
In general, drag is calculate with Equation 2.
![]() Equation 2. Drag formula.
Equation 2. Drag formula.
Drag is a function of the drag coefficient Cd, the drag coefficient is obtained experimentally. In Equation 2, r is density, V is velocity, and A is area.
4) Thrust
Thrust is a mechanical force and is dependent on Newton's third law of motion, where for every force there is an equal and opposite reaction force. The spinning of the blades push air down, there is an equal reaction in the air, creating a force in the opposing direction. Accordingly, the direction of the thrust force will be different depending on the mounting of the propellers.
[Find UAV manufacturers and suppliers on GlobalSpec.]
Summary
Civilians can now easily and inexpensively make drones for their personal use. Inexpensive prebuilt models are readily available and custom designs can be tailored according to intended use. Multirotor drones present design challenges related to stability and flight control but allow for vertical takeoff and landing. While short flight times pose a challenge for many users, multirotor drones are suited to a wide variety of uses.
References
Sebbane, B. Y. (2022). A First Course in Aerial Robots and Drones (Chapman & Hall/CRC Artificial Intelligence and Robotics Series) (1st ed.). Chapman and Hall/CRC.
About the author
Jody Dascalu is a freelance writer in the technology and engineering niche. She studied in Canada and earned a bachelor's of engineering. Jody has over five years of progressive supply chain work experience and is a business analyst. As an avid reader, she loves to research upcoming technologies and is an expert on a variety of topics.



