Robots Break Free from the Factory--Part 1
Larry Maloney | December 26, 2016 Not your father’s corn harvester. An autonomous tractor at work. Image source: Kinze Manufacturing.
Not your father’s corn harvester. An autonomous tractor at work. Image source: Kinze Manufacturing.
(Editor's note: This two-part article first ran at Engineering360 in December 2015. The topic remains timely, so we republish it as a special feature.)
The world may well be entering the golden age of robotics. Figures from the International Federation of Robotics show that sales of industrial robots, such as those that weld panels on auto assembly lines, surged by nearly 30% in 2014 compared with the previous year.
But there’s another class of robots that is also enjoying double-digit sales growth, so-called “field robots.” These increasingly sophisticated machines have taken robotics beyond the confines of the factory to perform tasks ranging from harvesting crops and mining coal to disarming bombs and performing surgery.
 William “Red” Whittaker, Carnegie MellonIn fact, the applications for such robots are limited only by our own imagination, says William “Red” Whittaker, who has spearheaded development of a long litany of field robots over the last 35 years and helped establish Pittsburgh’s Carnegie Mellon University (CMU) as one of the world’s premier centers for robotics R&D. Field robots designed by Whittaker and his teams at CMU’s Robotics Institute have cleaned up nuclear waste, explored volcanoes, mapped mines and inspected sewer systems. Next up: launch of a lander and rover to the moon by Astrobotic Technology, a CMU spinoff.
William “Red” Whittaker, Carnegie MellonIn fact, the applications for such robots are limited only by our own imagination, says William “Red” Whittaker, who has spearheaded development of a long litany of field robots over the last 35 years and helped establish Pittsburgh’s Carnegie Mellon University (CMU) as one of the world’s premier centers for robotics R&D. Field robots designed by Whittaker and his teams at CMU’s Robotics Institute have cleaned up nuclear waste, explored volcanoes, mapped mines and inspected sewer systems. Next up: launch of a lander and rover to the moon by Astrobotic Technology, a CMU spinoff.
Director of CMU’s Field Robotics Center and founder of his own robotics company, Whittaker discusses the potential of field robotics with Engineering360 contributing editor Larry Maloney.
Maloney: What do recent sales figures tell you about the overall acceptance of robotics?
Whittaker: There’s no question that the adoption of robotics is strong and growing stronger every year. At the same time, there’s an even higher growth in the investments being made in the development of robotics by companies, venture capitalists and government agencies. It’s astronomical. Industry numbers on robotics sales don’t even count the continual integration of technologies that stem from robotics R&D, such as the huge investments being made in automotive systems like GPS navigation, collision avoidance systems and other safety features.
Maloney: Is it more difficult to integrate robotics into applications beyond the factory?
Whittaker: Historically, the difficulty in implementing robotic technologies in the field was profound. But that has changed over the years with the increasing spread of new field robotic applications. Improvements in the fundamental building blocks needed for field robotics have come at a fast pace. As a result, we’ve seen a commoditization of such technologies as GPS, inertial sensing, software and control systems. For example, compared to what we faced 30 years ago, it is much easier now to put an automated guidance system onto a tractor. You can even buy an add-on kit. The interfaces that link these driverless tractors to control stations have also matured significantly over the years. So technologies that once seemed beyond belief are now being implemented across a whole realm of field robot applications. Nowadays, if you can dream it, you can pretty much do it.
Maloney: What are some of the most widespread field robotics applications?
Whittaker: Robotic farming and mining machines, of course, are some of the biggest success stories, and they have evolved over many years. But there are also fast-growing field robotic applications that are much more recent, such as drones. If you look at the rise of drones, we often think first about military applications, whether it be surveillance or delivery of offensive weapons. But drones are coming on strong in the commercial world as well. Farming journals, for instance, are rife with stories on the use of drones for evaluating crop yield, mapping soil conditions and the like.
Maloney: Can you cite some examples of key research now going on at the Field Robotics Center?
Whittaker: A good example is research involving unmanned aerial vehicles. This is a massive technical program that incorporates air platforms ranging from toy-sized drones to manned helicopters. The technologies involved include such areas as autonomous exploration, mapping, modeling and even cargo delivery, and the potential applications are as diverse as logistics, mine rescue, delivering materials to ships at sea during adverse conditions, and inspection work after nuclear accidents.
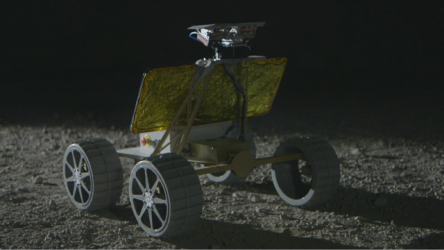 In the Google Lunar XPRIZE competition, Astrobotic Technology’s moon lander will carry its own Andy rover (shown here) as well as rovers or payloads from other international teams. Image source: Astrobotic Technology.Among other initiatives, we are developing CubeSats, which are shoebox-size satellites for space research, a growing area that is attracting major investments from such companies as SpaceX and Airbus, which envision deploying fleets of these compact satellites. At the same time, our researchers at the Field Robotics Center are working on CubeRovers; again, shoebox-size autonomous vehicles for exploring the surface of planets. In space, small is the next big thing, especially when you need to deliver payloads and rovers to the surface of the moon, as is the goal of the Google Lunar XPRIZE program. So it is important to develop new standards for payload sizes, computer interfaces and the like.
In the Google Lunar XPRIZE competition, Astrobotic Technology’s moon lander will carry its own Andy rover (shown here) as well as rovers or payloads from other international teams. Image source: Astrobotic Technology.Among other initiatives, we are developing CubeSats, which are shoebox-size satellites for space research, a growing area that is attracting major investments from such companies as SpaceX and Airbus, which envision deploying fleets of these compact satellites. At the same time, our researchers at the Field Robotics Center are working on CubeRovers; again, shoebox-size autonomous vehicles for exploring the surface of planets. In space, small is the next big thing, especially when you need to deliver payloads and rovers to the surface of the moon, as is the goal of the Google Lunar XPRIZE program. So it is important to develop new standards for payload sizes, computer interfaces and the like.
Maloney: Astrobotic Technology, a spinoff of the CMU Robotics Institute, is fielding a team in that $20-million XPRIZE competition.
Whittaker: Right. Astrobotic has developed its own rover for that competition, as well as a lander that will carry rovers or payloads developed by partner teams from such countries as Japan, Chile, Mexico and Germany. The manned Apollo missions did a great job, but they missed many things that really matter on the moon, such as the existence of abundant ice and the subterranean pits and caves. The goal of Astrobotic is not only to explore these features with rovers but also to serve as a kind of FedEx for delivering cargo to the moon.
(Read “A Robot Race to the Moon.”)
Maloney: In your career at the Robotics Institute, what were some of the seminal projects for advancing field robotics technology?
Whittaker: There were many, but it would be hard not to single out the Terregator (1984), the first rugged, autonomous outdoor driving machine. It pioneered sensor, mobile computing and vision technologies that have appeared on all sorts of robotic cars, trucks and tractors over the years. Terregator used an array of sonar and near-field sensors and a pair of cameras with digitizers to achieve outdoor stereo vision. This robot also was the first to implement route planning and tracking, as well as controls for achieving the cycle of sensing, thinking and driving.
 The Dante II robot prepares to make its descent into an Alaskan volcano. Technologies demonstrated by Dante may be put to use in future exploration of the moon and Mars, says Whittaker. Image source: CMU Robotics Institute.It’s important to note that CMU’s early robot navigation projects also spawned scores of engineers who have become the principals in many of today’s hot field robotic developments, such as Uber Pittsburgh’s driverless car project, as well as important R&D at companies like General Motors, Caterpillar and John Deere, as well as the Department of Defense (DOD).
The Dante II robot prepares to make its descent into an Alaskan volcano. Technologies demonstrated by Dante may be put to use in future exploration of the moon and Mars, says Whittaker. Image source: CMU Robotics Institute.It’s important to note that CMU’s early robot navigation projects also spawned scores of engineers who have become the principals in many of today’s hot field robotic developments, such as Uber Pittsburgh’s driverless car project, as well as important R&D at companies like General Motors, Caterpillar and John Deere, as well as the Department of Defense (DOD).
Other important early projects include our work on mining truck automation, which pioneered GPS to guide outdoor machines. This work also led the way to driverless tractors, which have had an enormous impact on feeding the world. Among other notable projects was our work for NASA to design the nomad robot that searched for meteorites in Antarctica in 2000. This robot demonstrated advanced perception, control and navigation, as well as search engine technologies that generated new knowledge of the natural world.
Another robot for NASA was Dante II (1994), an eight-legged, tethered walking robot for science missions in active volcanoes. Exploring Mt. Spurr in Alaska, the robot sampled high-temperature gas samples from the fumaroles on the crater floor. Dante pioneered spherical range scanning and also was the first to implement trinocular stereo vision—three eyes—for greater depth perception. In addition, the robot featured ruggedized, non-contact sensors in its feet to detect and measure footfall for better traction in the robot’s tethered descent. Fast forward to the present day, and you can see the potential application of such technologies in exploring the vast spits and caverns of the moon and Mars.
In Part 2, Red Whittaker discusses some of the projects underway at his robotics company, RedZone. And he explains why driverless cars are already here.
For More Information
Carnegie Mellon University Robotics Institute: https://www.ri.cmu.edu/
CMU Field Robotics Center: http://www.frc.ri.cmu.edu/
RedZone Robotics: http://www.redzone.com/
Astrobotic Technology: https://www.astrobotic.com/
Video on the Dante volcano explorer: https://www.youtube.com/watch?v=JJ5mx5-PHIs
Uber driverless car project: http://www.slate.com/blogs/future_tense/2015/06/02/uber_s_carnegie_mellon_partnership_how_everyone_wins_in_the_end.html
DARPA Robotics Challenge: http://www.theroboticschallenge.org/overview
NASA Valkyrie humanoid robot: http://spectrum.ieee.org/automaton/robotics/humanoids/nasa-wants-help-training-valkyrie-robot-to-go-to-mars
Video on drones for commercial use: http://www.youtube.com/embed/lUCYuvQ3ccA?rel=0&showinfo=0&autoplay=1



