Watch a gripper robot that can handle food, tools
Marie Donlon | March 01, 2021Robotic gripper technology capable of handling objects of assorted shapes, sizes and material compositions has been developed by researchers from the Korea Institute of Machinery and Materials (KIMM).
Capable of handling assorted objects ranging from screwdrivers and lightbulbs to coffee pots and delicate foods, such as strawberries and raw chicken, the robotic gripper can alter its rigidity according to the material composition of the object in its grasp.
According to the developers of the robotic gripper, the surface in contact with the object is soft enough so that the object in the gripper’s grasp does not incur damage and only the area held by the tool is selectively deformed. Additionally, the contact surface of the gripper deforms to match the target object’s silhouette to achieve a firm grip on the object.
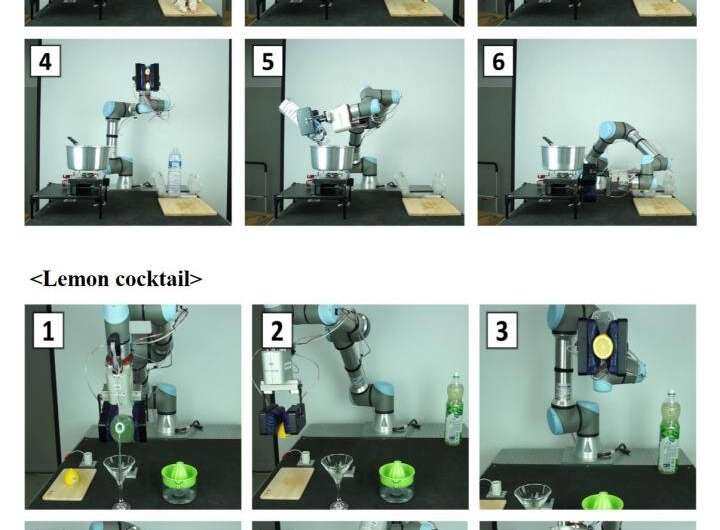 The Department of Robotics and Mechatronics at KIMM is giving a demonstration. TOP) Cooking 'Samgyetang' (whole chicken soup) with the clamp-type all-round gripper. BOTTOM) Squeezing lemon and making a cocktail. Source: The Korea Institute of Machinery and Materials (KIMM)
The Department of Robotics and Mechatronics at KIMM is giving a demonstration. TOP) Cooking 'Samgyetang' (whole chicken soup) with the clamp-type all-round gripper. BOTTOM) Squeezing lemon and making a cocktail. Source: The Korea Institute of Machinery and Materials (KIMM)
"The soft structure technology allows the gripper surface to perfectly match target objects in extremely soft states using the honeycomb structure and stretchable mesh structure," said Sung-hyuk Song, senior researcher at KIMM.
The KIMM team is eyeing the gripper for several different applications including household chores such as cooking and serving and for use cases in the manufacturing and packaging sectors.
For more information, watch the accompanying video that appears courtesy of KIMM. The research appears in the journal IEEE Transactions on Industrial Electronics.



