Soft robotic gripper scoops, picks and grasps
Marie Donlon | January 18, 2023A robotic gripper capable of scooping, picking and grasping a wide range of objects has been developed by a team of researchers from Singapore University of Technology and Design's (SUTD) Bio-Inspired Robotics and Design Laboratory.
The new reconfigurable workspace soft (RWS) robotic gripper is designed for use in the logistics and food sectors where it can perform picking and packing tasks, according to its developers.
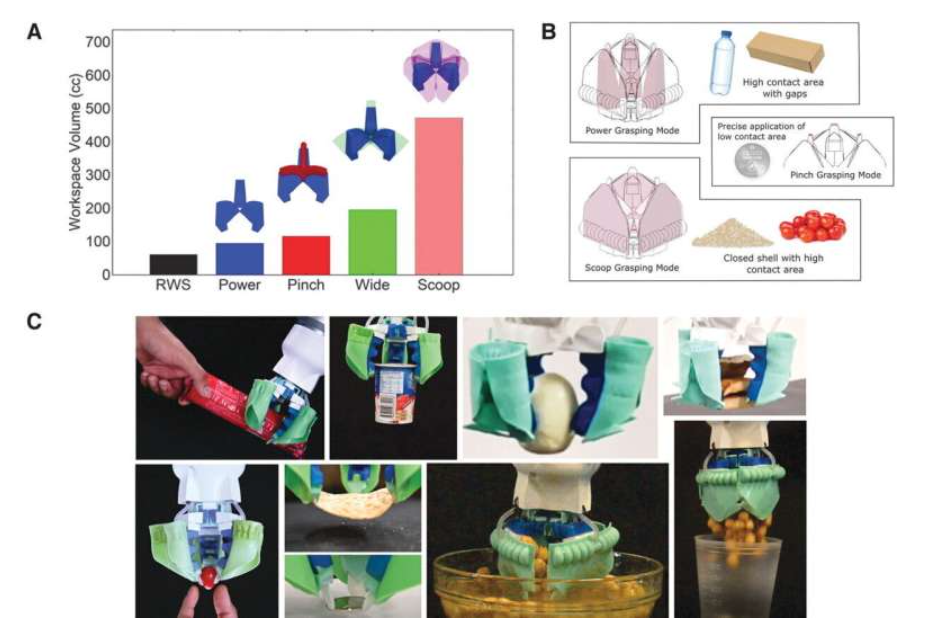 (A) Plot showing the workspace volumes of the RWS gripper in its four modes. The gripper volume in the unactuated state (“RWS”) is also plotted for reference. (B) Illustration showing the variation of gripper contact area for various grasping modes, each contact area best suited for a payload type. (C) RWS Gripper grasping (top row, from left to right) a cookie pack (power grasping mode) yogurt container (wide grasping mode) egg and tofu stack (power grasping mode), (bottom row, from left to right), cherry tomato, crisp and coin (pinch grasping mode), and chickpeas (scoop grasping mode) (D) The RWS gripper grasping payloads from YCB benchmark object sets—(top row, from left to right) a mug, knife, tuna can, bolt, screw driver; (middle row, from left to right) scissors, can of spam, baseball, clamp, strawberry; (bottom row, from left to right) marker, screw driver, nut, credit card. Source: SUTD
(A) Plot showing the workspace volumes of the RWS gripper in its four modes. The gripper volume in the unactuated state (“RWS”) is also plotted for reference. (B) Illustration showing the variation of gripper contact area for various grasping modes, each contact area best suited for a payload type. (C) RWS Gripper grasping (top row, from left to right) a cookie pack (power grasping mode) yogurt container (wide grasping mode) egg and tofu stack (power grasping mode), (bottom row, from left to right), cherry tomato, crisp and coin (pinch grasping mode), and chickpeas (scoop grasping mode) (D) The RWS gripper grasping payloads from YCB benchmark object sets—(top row, from left to right) a mug, knife, tuna can, bolt, screw driver; (middle row, from left to right) scissors, can of spam, baseball, clamp, strawberry; (bottom row, from left to right) marker, screw driver, nut, credit card. Source: SUTD
Composed of soft actuators and hyper-elastic materials, the RWS robotic gripper can safely and reliably grasp a larger range of objects — such as convex, nonconvex and deformable items like melon and cereal boxes, for instance — than robot grippers composed of rigid materials.
To enable this range, the researchers designed the RWS gripper using multimodal actuation, wherein the grasping workspace of the soft gripper can be altered instantly to accommodate payloads featuring different contact area requirements.
Further, the RWS gripper can change and increase its grasping workspace volume by nearly 400%, according to the researchers, through a combination of shape-morphing fingers, retractable nails and an expandable palm. This reportedly enables the widest possible range of grasping capabilities achieved so far by a single soft gripper.
An article detailing the robotic gripper, A Multimodal, Reconfigurable Workspace Soft Gripper for Advanced Grasping Tasks, appears in the journal Soft Robotics.
For more information on the RWS robotic gripper, watch the accompanying video that appears courtesy of SUTD.


