Video: Artificial polyp designed as an aquatic robot
S. Himmelstein | July 22, 2020A soft robotic system with gripper functionality has been engineered for aquatic applications by researchers from Eindhoven University of Technology (the Netherlands) and the University of Warwick (U.K.). The design was inspired by the ability of the coral polyp to induce currents that bring food particles within grasping reach.
Motion of the wireless artificial polyp is activated by exploiting the forces of light and magnetism. The grasping arms are composed of two photoactive liquid crystalline polymer films attached to a flexible stem of polydimethylsiloxane doped with magnetic iron oxide particles. Light activates the liquid crystal network gripper and a magnetic field induces rotational motion of the flexible stem to create flow. Exposure to different light 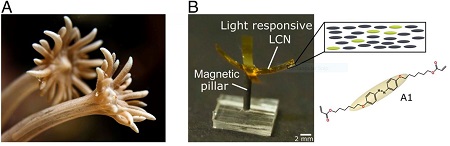 The marine polyp (A) inspired the design of the artificial polyp (B). Source: Marina Pilz da Cunha et al.wavelengths results in different motions of the 1 cm2 device. The grasping tentacles were demonstrated to grip under the influence of UV light and to release its grip when exposed to blue light. The system sits on a rotating magnet that helps the robot to induce stirring and attract suspended objects.
The marine polyp (A) inspired the design of the artificial polyp (B). Source: Marina Pilz da Cunha et al.wavelengths results in different motions of the 1 cm2 device. The grasping tentacles were demonstrated to grip under the influence of UV light and to release its grip when exposed to blue light. The system sits on a rotating magnet that helps the robot to induce stirring and attract suspended objects.
While operating underwater, the stimuli-responsive material holds its deformation after being activated by light. The photothermal material immediately returns to its original shape after the stimuli has been removed and the molecules in the photomechanical material then take on a new state, allowing different stable shapes to be maintained for a longer period of time. This mechanism helps to control the gripper arm and once something is captured, the robotic device can keep holding it until the appropriate light exposure prompts a release reaction.
The research reported in PNAS could lead to the development of water-purifying artificial polyps or swimming robots designed for other applications.



