Team develops new robotic gripper for automated apple picking
Marie Donlon | June 17, 2024Researchers from Washington State University (WSU) have developed a robotic gripper capable of gently grabbing apples out of a tree without damaging them.
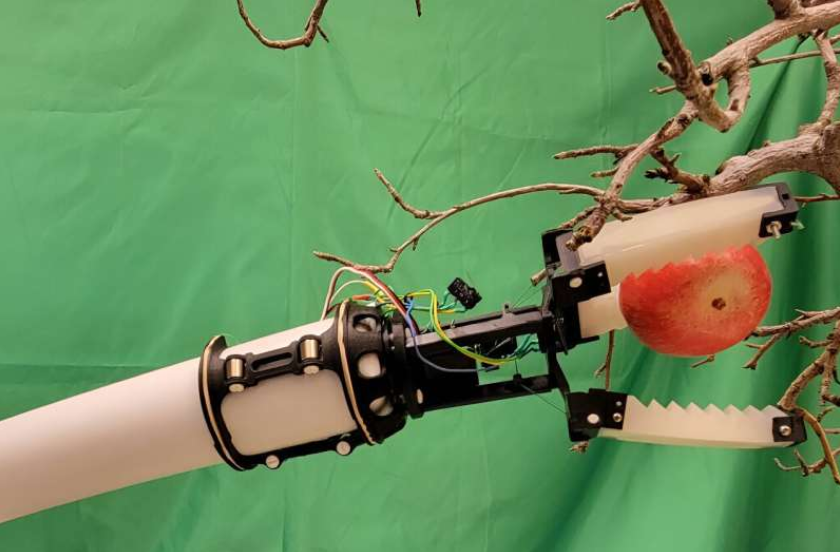
The robotic gripper, which weighs just shy of 1 lb, is being developed, according to the researchers, in a bid to alleviate labor shortages plaguing the agricultural industry.
 Source WSU
Source WSU
According to its developers, the gripper relies on three cables to move its 3D-printed hard plastic and silicone rubber-tipped fingers, which are reportedly gentle enough to handle the apples without damaging them, but strong enough that they can pull the apples from the tree.
Additionally, the gripper includes a switch for grasping the apple and subsequently letting it go. When trialed in an actual orchard, the gripper successfully grabbed more than 87.5% of the apples in that orchard without damaging them.
In the future, the WSU team intends to connect the light-weight gripper to a low-cost robot system currently in development.
An article detailing the robotic gripper, “Design and Evaluation of a Lightweight Soft Electrical Apple Harvesting Gripper,” appears in the Proceedings of the IEEE 7th International Conference on Soft Robotics.


