Team develops line of soft robots inspired by the cheetah
Marie Donlon | May 11, 2020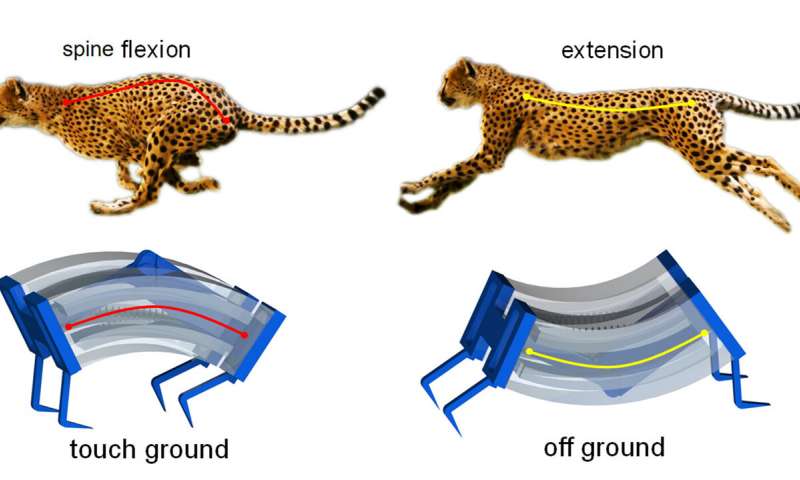 Source: North Carolina State UniversityResearchers from North Carolina State University have developed a cheetah-inspired robot that can achieve greater speeds than other soft robots.
Source: North Carolina State UniversityResearchers from North Carolina State University have developed a cheetah-inspired robot that can achieve greater speeds than other soft robots.
The team modeled their soft robots, called the leveraging elastic instabilities for amplified performance (LEAP), after the cheetah, reportedly the fastest animal on land, mimicking how the animal flexes its spine to achieve high speeds. To do this, the researchers built the soft robots with a spring-powered bistable spine that enables the robots to move between two different stable states via pumped air through the channels in the soft robots’ linings.
Switching between the different stable states is accomplished through the release of energy, enabling the robot to exert force on the ground, which allows the cheetah-inspired robot’s feet to leave the ground, resulting in a galloping motion.
According to the research team, the LEAP soft robots can travel at 2.7 body lengths per second, which is three times faster than other soft robots, which travel at an estimated 0.8 body lengths per second. Additionally, soft robots tend to only crawl while the LEAP soft robots can gallop, climb inclines, swim and even grab and lift heavy objects.
The team envisions using the cheetah-inspired soft robots for search and rescue and industrial manufacturing applications in the future.
The paper, "Leveraging elastic instabilities for amplified performance (LEAP): spine-inspired high-speed and high-force soft robots," appears in the journal Science Advances.



