Indian robot automatically finds and collects litter
Marie Donlon | September 03, 2019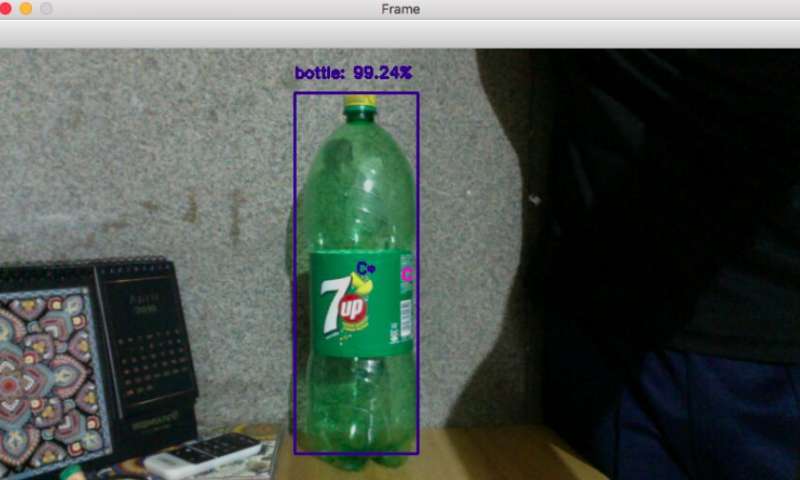 A demonstration of the system’s distance approximation. Source: Bansal et al.Researchers at the Vishwakarma Government Engineering College in India have developed an autonomous garbage detection and collection system to assist waste collection in populous locations.
A demonstration of the system’s distance approximation. Source: Bansal et al.Researchers at the Vishwakarma Government Engineering College in India have developed an autonomous garbage detection and collection system to assist waste collection in populous locations.
Using artificial intelligence (AI) algorithms, the robotic system, which has been dubbed automatic garbage detection and collection (AGDC), detects and locates waste, and then collects it using an attached robotic gripper, which places the waste in an onboard drawer.
The system consists of a robotic body composed of a base, drawer and robotic arm, along with a host of machine learning algorithms, including convolutional neural networks (CNNs) to locate the waste within the robot’s vicinity. Once located, the system gauges its location by examining images amassed by an integrated camera.
As soon as the CNNs locate the garbage within the robot’s vicinity, additional algorithms then determine the distance between the waste and the robot. The location of the garbage, along with the instructions, are then given to a microcontroller that governs the robot’s movements. Based on that information, the microcontroller guides the robot to the waste and the robotic arm is instructed to pick up the waste and to place it in the onboard drawer.
"Object detection refers to identifying instances of objects of a particular class (such as bottles, cat, dog or truck) in images and videos in digital format," the researchers explained. "AGDC uses object detection for classifying the garbage with the rest of the objects in the image/video. The object detection algorithm enables AGDC to identify places in the image or video where the object of interest (i.e. garbage) is resting."
The current prototype of the system can collect and carry roughly 100 g to 200 g of garbage. However, the team envisions that future iterations of the AGDC will be capable of carrying roughly 2 kg to 3 kg of waste before having to unload. The researchers also envision training a new CNN model that would enable the AGDC to locate several pieces of garbage at once.
The research appears in arXiv.



