Swallowable 3D-printed robot could revolutionize gastrointestinal procedures
Marie Donlon | March 11, 2026Engineers at the University of Texas (UT) Austin have developed a new 3D-printable and magnetically steerable capsule robot that promises to help diagnose and treat some gastrointestinal (GI) conditions.
The new capsule robots developed for medical applications can reportedly be swallowed by patients and steered using magnetic fields. The team explained that such robots could reduce the current reliance on endoscopic procedures, thereby allowing physicians to reach specific regions in the GI tract reliably and less invasively for patients.
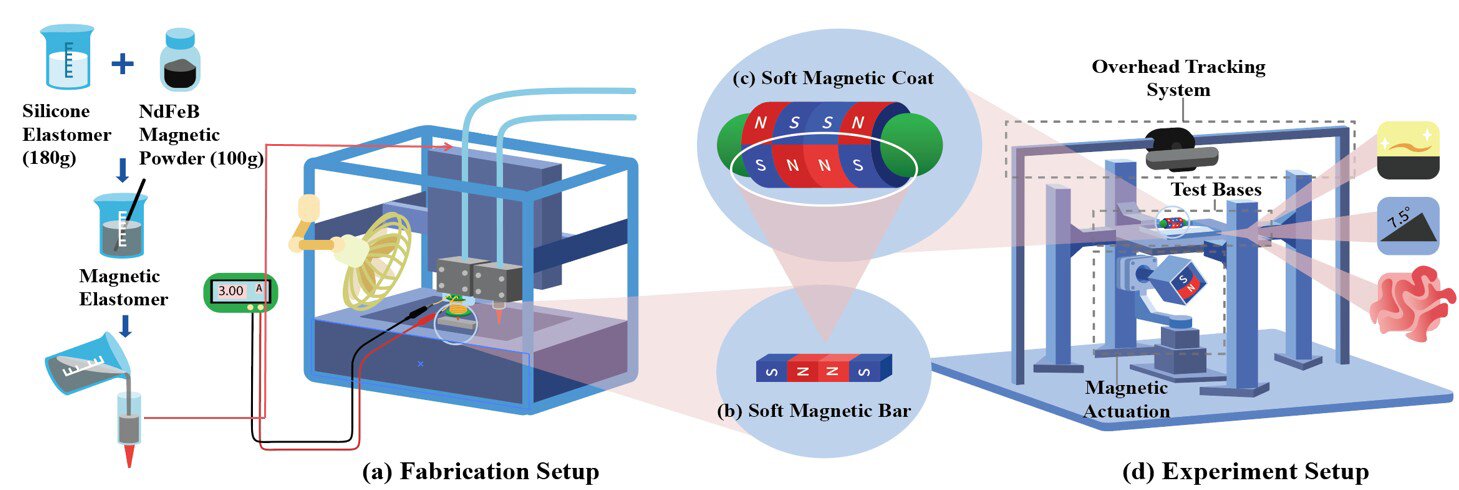 Overview: (a) Fabrication Setup with 180 g silicone + 100 g NdFeB composite, (b) Soft magnetic bar with programmable polarity, (c) Capsule's soft magnetic coat for rolling and directional rotating, (d) Experiment setup with diverse test bases. Source: Zhou et al.
Overview: (a) Fabrication Setup with 180 g silicone + 100 g NdFeB composite, (b) Soft magnetic bar with programmable polarity, (c) Capsule's soft magnetic coat for rolling and directional rotating, (d) Experiment setup with diverse test bases. Source: Zhou et al.
To develop the robot, the team assessed the different actuation modalities of a previously developed capsule robot that allows the robots to complete different tasks inside the human body. The team explored the use of external permanent magnets and on-capsule anisotropic soft magnetic materials coated on the wall of the capsule, which would allow the roll and yaw angle control of the capsule robot motion.
"For roll and yaw control with external permanent magnets, we focused on using a magnetic shell around capsule so that the internal components have more continuous space," the team explained. "To ensure stable motion with good external magnet and internal alignment, we are inspired by the Halbach array for the magnetic component arrangement, which concentrates magnetic field on one side for magnetically levitated stages."
Rather than embedding a bulky permanent magnet, the capsule’s outer shell was coated with a soft magnetic material, turning it into a programmable magnet. This material was created by mixing NdFeB particles with soft silicone and 3D-printing the shell while precisely controlling the magnetization direction during fabrication.
"This created an optimized NSSN/SNNS magnetic field distribution pattern," the team explained. "The patterned anisotropy generates a strong, well-defined net magnetic moment that naturally aligns with a rotating external magnetic field, producing stable rolling and steering motion. As the magnetic field distribution is carefully engineered to create directional torque and predictable alignment, the capsule can roll bidirectionally, turn smoothly, and maintain stability on inclines or textured surfaces without requiring complex feedback control algorithms."
In the absence of bulky internal magnets, the entire volume inside the capsule is preserved, thereby leaving space for other components that could be employed in the completion of medical tasks, like cameras, sensors, pharmaceutical drugs or other therapeutic substances.
Further, the tiny capsule robot is reportedly easy to ingest and, subsequently, could be used to perform diagnostic and therapeutic procedures within the GI tract. However, before its use in clinical settings, the team will need to confirm that it is bio-compatible and can be safely introduced inside the body.
Additionally, to perform specific tasks, the robot capsule could potentially be filled with assorted electronic components, drug reservoirs or medical tools — for example, cameras, biopsy tools, anti-inflammatory drugs, chemotherapy drugs, or miniature sensors.
The team noted that some potential use cases for the capsule robot include active capsule endoscopy with controlled navigation, targeted drug release at specific lesion sites, localized biopsy sampling, or, possibly, sensor-enabled monitoring of physiological signals.
An article detailing the capsule robot, “3D-Printed Anisotropic Soft Magnetic Coating for Directional Rolling of a Magnetically Actuated Capsule Robot,” appears in the journal arXiv.