These gear reducers maximize torque and minimize backlash
September 05, 2025Gear reducers are an essential technology that multiply the torque from a drive motor to amplify force for heavy loads. This multiplication is directly proportional to a change in the output revolutions per minute (RPM), or rotational speed. Coming to the market are two key reducer series for modern motion control applications: the ROBONIC drive reducers, optimized for high torque and smooth operation; and the CYKODRIVE cycloidal reducers, designed for compact efficiency and minimal backlash.
ROBONIC series
This drive series uses a thin-race ball bearing to minimize friction, a flexible cup gear to absorb shocks and misalignments, and a precision-cut internal gear to reduce backlash. The components in the ROBONIC series are built to provide the system with enhanced structural integrity and optimized energy transmission.
The elastic bearing and wave generator form an elliptic shape when assembled and are used at the input of the gearbox, connected to the motor shaft. The flex gear, which can be a cup-type (DSF/DSG) or hat-type (DHG) configuration, is a thin cylindrical cup that will take on the elliptical shape of the wave generator and elastic bearing when assembled with them. This flex gear is also the output that is attached to the output flange.
 Figure 1. The precision-cut components within the DSF and DSG drive series minimize shock, misalignment and backlash for smooth operation. Source: Pelonis Technologies
Figure 1. The precision-cut components within the DSF and DSG drive series minimize shock, misalignment and backlash for smooth operation. Source: Pelonis Technologies
The external teeth of the now-elliptical flex gear engage with the rigid teeth of the circular internal gear at two opposing points along the central axis of the ellipse. The internal gear remains stationary as the wave generator rotates. A clockwise rotation of the wave generator (Figure 2) results in a counterclockwise rotation of the flex gear. The difference in tooth count between the flex gear and the internal gear dictates the output rotation speed.
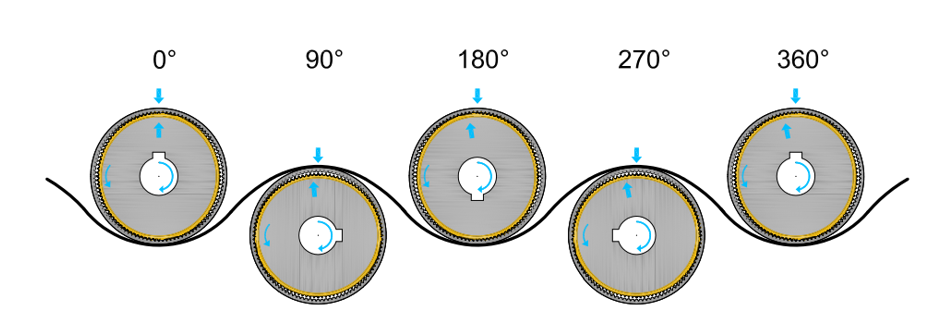 Figure 2. The output spins in the opposite direction of the wave generator. Source: Pelonis Technologies
Figure 2. The output spins in the opposite direction of the wave generator. Source: Pelonis Technologies
CYKODRIVE series
The CYKODRIVE is specifically designed for high torque in a small form factor. This is enabled by the cycloidal pinwheel mechanism shown in Figure 3 that also minimizes backlash to less than 1 arcmin.
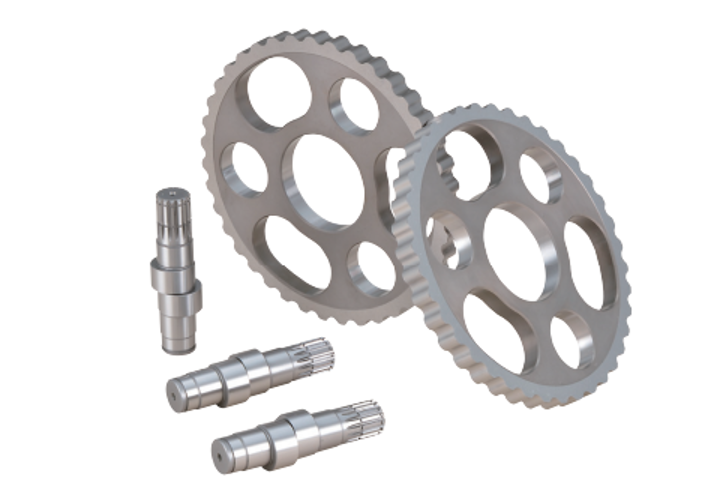 Figure 3. The cycloidal discs and unique camshafts maximize torque output of this reducer in a small area. Source: Pelonis Technologies
Figure 3. The cycloidal discs and unique camshafts maximize torque output of this reducer in a small area. Source: Pelonis Technologies
The cycloidal tooth design offers a high twisting stiffness. Dual cycloidal wheels offer multi-toothed meshing for increased strength. The angular contact ball bearings increase the bearing span and rigidity of the output end. All of these factors will allow the CYKODRIVE series to take up to five times its rated torque without damage to the equipment. The CYKODRIVE series can mate with multiple inputs, including a component-type input, motor flange input or shaft input.
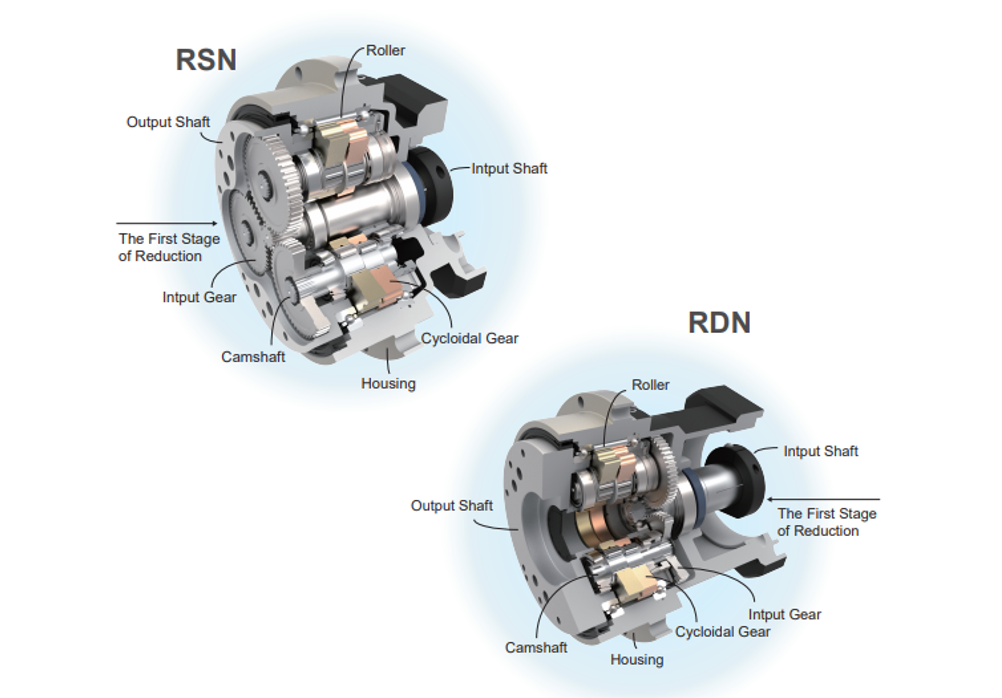 Figure 4. A cross-sectional view of the RSN and RDN series that each support the RS and RD outputs, respectively. Source: Pelonis Technologies
Figure 4. A cross-sectional view of the RSN and RDN series that each support the RS and RD outputs, respectively. Source: Pelonis Technologies
Pelonis Technologies
Both the ROBONIC and CYKODRIVE series are ideal for motion control applications such as robotics, CNC machining, aerospace and defense, medical equipment and more. All reduction drives can be built for customizable integration. Contact Pelonis Technologies for more information on how these reducers can benefit a design.



