Two-finger robotic hand takes on everyday manipulation tasks
Marie Donlon | September 15, 2024A team of researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT) has designed a two-finger robotic gripper for performing everyday manipulation tasks.
According to its developers, the robotic system can pick up objects of assorted shapes and textures and subsequently place them in specified locations.
 Source: arXiv (2024). DOI: 10.48550/arxiv.2408.04142
Source: arXiv (2024). DOI: 10.48550/arxiv.2408.04142
"We provide the mechanical and dynamical requirements for a robotic finger capable of performing 30 diverse everyday tasks," the team explained. “To match these requirements, we present a finger design based on series-elastic actuation that we call the everyday finger. Our focus is to make the fingers as compact as possible while achieving the desired performance."
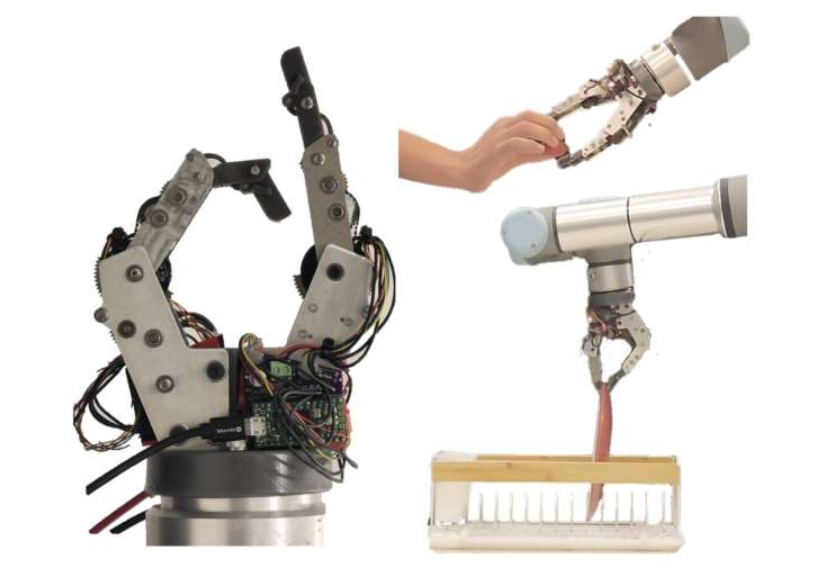
The robotic gripper is a structure featuring two robotic fingers, which resemble human fingers, that protrude from the base and are capable of bending and tightly grasping objects. The current iteration of gripper can take on everyday tasks — including picking up objects and placing them in a defined location — thanks to its 2 degrees of freedom (DoF). Eventually, the team intends to create a robotic gripper with even more fingers.
The team tested the two-finger gripper using a series of real-world experiments designed to evaluate the speed and compliance of their robotic gripper system, along with the force it applied to objects while performing three "pick-and-place" tasks including picking and placing dishes in a rack, picking thin and flat objects like paper and delicate objects such as strawberries.
During those experiments, the team’s two-finger gripper successfully performed all three of those basic tasks.
The robotic gripper system is detailed in the article “Everyday Finger: A Robotic Finger that Meets the Needs of Everyday Interactive Manipulation,” which appears in the journal arXiv.


