Robotic Grippers Take on Complex Industrial Tasks
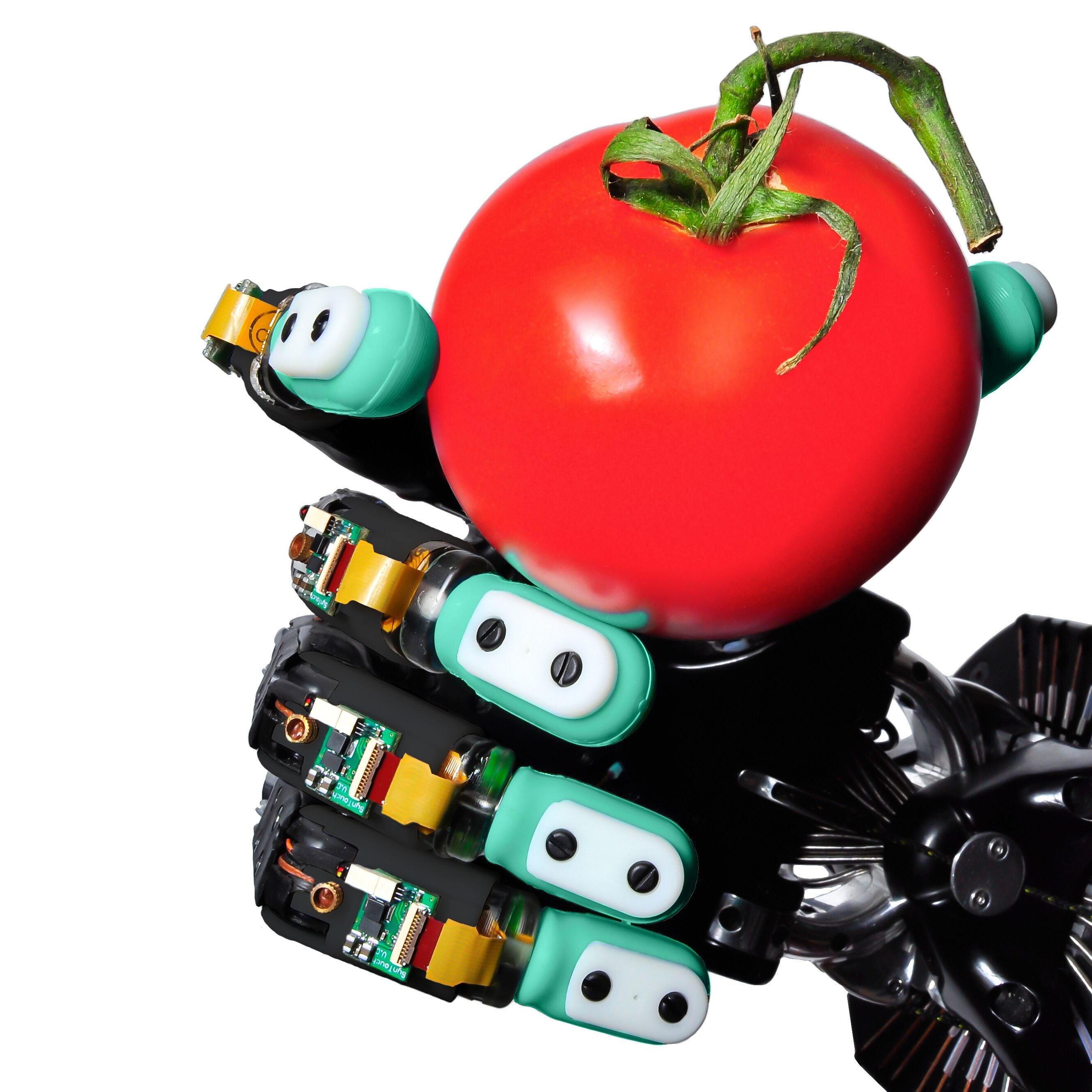
Winn Hardin | November 10, 2015 The tactile-sensing technology known as BioTac incorporates the mechanical properties of a fingertip. Image source: SynTouch
The tactile-sensing technology known as BioTac incorporates the mechanical properties of a fingertip. Image source: SynTouch
With the development of the Stanford arm in 1969, the industry had a front-row seat to the possibilities of robotic grippers on the factory floor. Designed by Stanford University mechanical engineering student Victor Scheinman, the six-axis articulated robot arm featured an electric gripper with tactile sense contacts on the fingers. The unit performed small parts assembly upon its commercial launch in the mid-1970s.
The industry once again is seeing into the future of robotic grippers as engineers find new ways to automate nimble, complex applications. The work of researchers and robotics firms marks a shift from the current state of industrial robotic grippers, many of which are designed for a single task.
Whether they are mimicking biological processes or handling delicate materials without the need for special programming, next-gen robotic grippers combine ease of use and versatility to improve the efficiency and accuracy of process industries.
Keep It Simple… and Versatile
As manufacturers and other industrial sectors explore new ways to automate processes, they want grippers that are intuitive and multifunctional.
 Because fingerprints are critical in creating vibrations in human fingertips, SynTouch engineers replicated them on the BioTac. “When you have a manufacturing process to execute with different tasks like high mix or high changeover, you really want to use one single tool to do them all,” says Samuel Bouchard, president of Robotiq. His company manufactures what it calls self-adapting robot grippers that feature independent fingers. If there is an uneven part, for example, “one finger can stay in a parallel position while the other can adapt and encompass the object,” Bouchard says.
Because fingerprints are critical in creating vibrations in human fingertips, SynTouch engineers replicated them on the BioTac. “When you have a manufacturing process to execute with different tasks like high mix or high changeover, you really want to use one single tool to do them all,” says Samuel Bouchard, president of Robotiq. His company manufactures what it calls self-adapting robot grippers that feature independent fingers. If there is an uneven part, for example, “one finger can stay in a parallel position while the other can adapt and encompass the object,” Bouchard says.
That differs from most other electrical grippers on the market, which are simple parallel grippers and are “made for a manufacturing process that is stable over a long period of time,” he says.
The speed, force and position of Robotiq’s line of three grippers are programmable. This feature allows them to carry a range of objects. The company’s newest release, the 2-Finger 140 Adaptive Robot Gripper, targets high-mix pick-and-place tasks in industries such as electronics and consumer goods. Engineers designed it for applications that require a wider stroke (140 mm) than its predecessor, the 2-Finger 85 (85 mm). For manufacturing processes requiring strength, durability and larger payloads—up to 10 kg—Robotiq developed the 3-Finger gripper.
 The 2-finger 85 and 2-finger 140 adaptive robot grippers. Image credit: Robotiq. The three grippers perform tasks such as machine tending, general pick-and-place, product testing, assembly, mobile manipulation, packaging “and any other applications that require the robot to carry parts from one position to another,” Bouchard says.
The 2-finger 85 and 2-finger 140 adaptive robot grippers. Image credit: Robotiq. The three grippers perform tasks such as machine tending, general pick-and-place, product testing, assembly, mobile manipulation, packaging “and any other applications that require the robot to carry parts from one position to another,” Bouchard says.
Although the adaptive grippers are said by the company to be compatible with all major industrial robot manufacturers, Robotiq is focusing on collaborative applications that allow humans and robots to work side-by-side. The grippers integrate with Universal Robots, which makes robot arms that automate and streamline repetitive processes in a collaborative fashion.
Additionally, Robotiq has introduced an embedded “widget” in Universal’s teach pendant that allows the operator to manipulate the gripper directly from the user interface.
Lab Automation Parallels Industry
Just as they handle delicate parts and materials on the factory floor, flexible robotic grippers can also do the same for laboratory automation in the life sciences.
“Handling biological specimens and caustic chemicals is exacting work,” says Stefan Casey, vice president of engineering at Applied Robotics. In the life sciences laboratory, a spill “could damage not only your tooling and equipment, but even put people and the environment in danger.”
With these requirements in mind, Applied Robotics created the SmartGripper. It offers repeatability within +/- 0.1mm, a brake to prevent items from dropping, variable grip force and electric operation instead of pneumatics, a feature that is intended to eliminate contaminants from an air supply entering the work cell.
Applied Robotics also moved into handling and packaging food. Engineers developed the Meat Gripper to handle meats, fish and cheese in fresh, frozen and sliced forms. It received acceptance by the U.S. Department of Agriculture because it adheres to all production cleaning guidelines, Applied Robotics says. The gripping device uses rapid air-driven open and close times and smooth movement that makes it compatible with high-speed robots, Casey says.
The SmartGripper includes several iterations. SmartGripper 3.0, for example, was initially designed for Motoman Robotic in 2009 to be used as the “hands” in its robot bartender products. This small, stepper-based gripper is now deployed in a variety of material-handling and pick-and-place applications.
A Soft Touch
 Empire Robotics’ Versaball uses an elastic polymer ball filled with a sand-like material to grip objects like this light bulb. Unlike many robotic grippers whose mechanisms are fingers or pinchers, Empire Robotics’ Versaball uses an elastic polymer ball filled with a sand-like material. The flexible robotic end-effector uses the jamming transition of granular materials to grab objects.
Empire Robotics’ Versaball uses an elastic polymer ball filled with a sand-like material to grip objects like this light bulb. Unlike many robotic grippers whose mechanisms are fingers or pinchers, Empire Robotics’ Versaball uses an elastic polymer ball filled with a sand-like material. The flexible robotic end-effector uses the jamming transition of granular materials to grab objects.
The pneumatically operated system pumps air into the ball to make it soft. When the ball encompasses the target object, air is sucked out. This action pulls the granules together and hardens the ball to grasp the object.
Versaball also uses passive technology, says Bill Culley, president and co-founder of Empire Robotics. Many grippers require path planning and specification of what part to pick. However, Versaball “is designed to handle a very wide range of parts without any special programming or custom engineering of gripper fingers,” Culley says.
The Versaball gripping system comes in either a 3.5- or 6.5-in. head with lifecycles ranging from 30,000 to 60,000 grips and payloads of up to 20 lbs. Cycle time is about 0.1 seconds for the smaller grip and 0.7 seconds for the larger. When used with collaborative robots, the cycle time “is typically right in line with the overall application,” says Culley.
Empire Robotics has been distributing the system, which also includes a pneumatic base and adapter plate, as a research kit for almost two years. Most of these kits go to research and development groups to test applications not currently automated. Culley says that he expects the Versaball to be ready for larger real-world-scale applications within the next six to 12 months.
Naturally Inspired
Some robotic grippers under development aim to mimic natural processes such as the human hand. It is a challenging approach since the human hand operates with considerably more sensor input than a robot gripper, which only knows sequences of actions and generally includes only “force feedback” to make sure the applied force does not crush the object.
A company that spun off as a result of research performed at the University of Southern California is SynTouch, which sets out to endow grippers with virtually all the sensory capabilities of the human fingertip. These include skin deformation, the way in which a fingertip feels forces; vibration, produced from the friction of the fingers sliding over a surface; and thermal sensing, which detects the transfer of heat.
The resulting tactile-sensing technology, known as BioTac, also incorporates the mechanical properties of a fingertip. Similar to the human fingertip in size and shape, the BioTac model features an elastic silicone skin covering an epoxy bone-like core equipped with surface-mounted electrodes. The sensitive electronics are inside the product.
In between the skin and the epoxy layer is a conductive fluid. When the BioTac comes in contact with forces, the surface and underlying liquid distort. This action changes the impedances of the electrodes. A thermistor near the surface of the rigid core transduces temperature and heat flow.
Meanwhile, a pressure sensor connects to the fluid layer in order to measure the vibrations generated when the silicone skin drags across an object. Since fingerprints are critical in creating vibrations in the human fingertip, SynTouch engineers replicated them on the BioTac. Adding the ridges amplified vibrations by a factor of 30, says Matt Borzage, head of business development and a founding partner.
BioTac includes the fingernail, and not just for aesthetic purposes. If humans did not have fingernails, “we would not be able to detect shear movement very well because the skin would rotate freely all the way around the finger,” Borzage says. The fingernail lets the BioTac measure lateral motion in the same way a human finger does.
In September 2015, SynTouch released the BioTac SP. The company says that the SP, which stands for single phalanx, has the same mechanical and sensory properties of the original BioTac, but in half the volume. Other improvements include 24 deformation-sensing electrodes instead of 19, and a design that is capable of withstanding twice the amount of applied force, now in excess of 200N.
The miniaturized technology integrates into several anthropomorphic robots including Shadow Robot Co.’s Dexterous Hand. The unit has 20 actuated degrees of freedom and mounts on a range of robot arms.
Although SynTouch initially developed the BioTac technology for prosthetic hands, the company spotted an opportunity to make better robotic systems. Building general-purpose robots that can reach out and grab whatever they need requires the sense of touch.
Additionally, SynTouch is fielding requests from large manufacturers that want to quantify how their products feel using the BioTac technology. The company currently provides this capability as a service and plans to install such systems in factories in the next 18 months.
Like Catching Prey
It is not just the human form that influences robotic gripper technology. Festo, which manufactures products for process control and factory automation, has developed a series of nature-influenced grasping devices as part of its Bionic Learning Network. This alliance of universities, institutes and development companies devises new technologies, manufacturing methods and products, and then tests their market relevance with customers. The group’s FlexShapeGripper, for example, takes its cues from a chameleon’s tongue.
Just as the chameleon forms the tip of its tongue to fit its selected prey, the FlexShapeGripper delivers an adaptive, formfitting gripping process using a smooth, flexible plastic silicone cap. The gripper picks up, collects and sets down several differently shaped objects in one procedure without needing to switch out the tool, says Elias Knubben, head of corporate bionic projects at Festo.
In developing the FlexShapeGripper, “we learned once again that complex problems often can be solved by simple mechanisms,” Knubben says. “The challenge is now to transfer this simple mechanism into a concept that is fit for industrial use.”
Potential tasks suited to the FlexShapeGripper include assembly, small-components handling and sorting fruits and vegetables or other irregularly shaped objects.
Outsourcing Dexterity
While replicating biological functions in robotic grippers shows promise, it can be complicated and expensive. Instead of duplicating the intrinsic capabilities of the human hand, researchers at the Massachusetts Institute of Technology (MIT) have developed a gripper model that uses an approach called “extrinsic dexterity.”
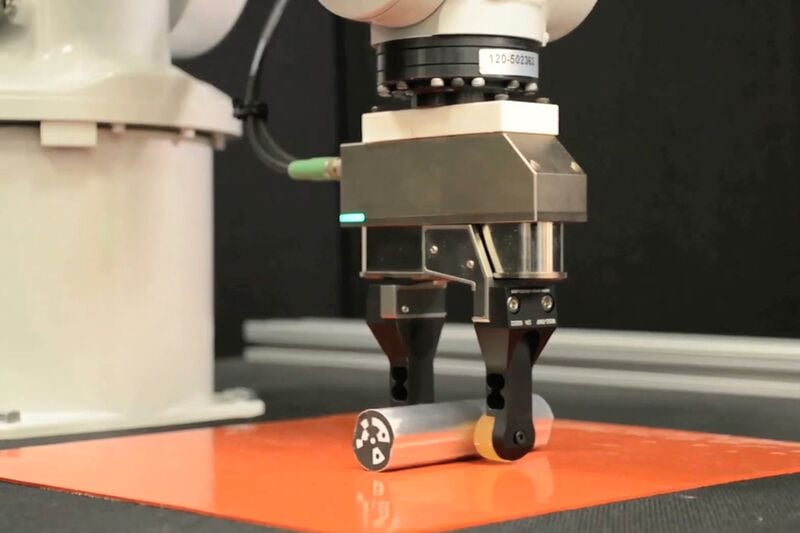 A robot grips a rod while pushing it against a tabletop, allowing the rod to rotate in the robot’s "fingers." Image credit: MIT. Extrinsic dexterity occurs when a basic robotic gripper exploits its environment to adjust its grip on an object. Think of a pen on a table as an example. Rather than maneuvering it like human fingers would, the two-finger gripper could rotate the pen by pushing it against a wall or another fixture.
A robot grips a rod while pushing it against a tabletop, allowing the rod to rotate in the robot’s "fingers." Image credit: MIT. Extrinsic dexterity occurs when a basic robotic gripper exploits its environment to adjust its grip on an object. Think of a pen on a table as an example. Rather than maneuvering it like human fingers would, the two-finger gripper could rotate the pen by pushing it against a wall or another fixture.
“The environment acts as an extra finger,” says Alberto Rodriguez, assistant professor of mechanical engineering at MIT and lead researcher on the project. The gripper model developed by Rodriguez predicts the exerted force necessary to manipulate the object.
Since it works with simple robotic grippers currently used in industry, extrinsic dexterity “focuses on being more effective with what we already have rather than coming up with complex, costly solutions,” Rodriguez says.
One potential application evaluated by him is the assembly of mobile phones. “It’s an industry that could use more automated solutions for productivity and quality control,” he says. “Dexterity is important for automation.”
With a wide range of robotic gripping technologies heading to factory floors, manufacturers are starting to automate processes such as assembling fragile parts and sorting oddly shaped objects. Advances in robotic grippers demonstrate the potential to improve flexibility, speed, accuracy and efficiency not only on the production line, but also for overall operations.



