A quadruped robot that can simultaneously walk and handle objects
Marie Donlon | May 10, 2024A team of researchers at Carnegie Mellon University, the University of Washington and Google DeepMind has developed a quadrupedal robot that can pick up and handle objects with the very legs it walks with.
The quadruped, dubbed LocoMan, is reportedly highly dexterous and capable of performing an assortment of manipulation tasks.
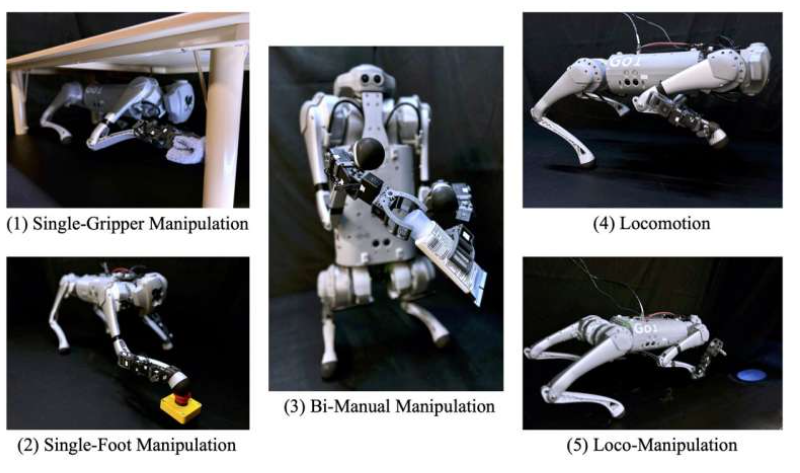 The robot's five operation modes. Source: Lin et al
The robot's five operation modes. Source: Lin et al
According to its developers, LocoMan’s structure and configuration enable the quadruped to perform 6D pose manipulation in complex environments, such as confined spaces. To accomplish this, LocoMan relies on the team’s newly developed Loco-manipulator, which is a modular manipulator with 3-DoF. The team attached two Loco-manipulators to the quadruped’s front calves, thereby enabling the calves to also function as hands.
The researchers explained: "LocoMan is a versatile quadrupedal robot, consisting of a standard quadrupedal robot and two Loco-manipulators. It operates under a comprehensive Whole-Body Control (WBC) framework, facilitating a seamless transition across five operational modes: single-gripper manipulation, single-foot manipulation, bimanual manipulation, locomotion, and loco-manipulation. By equipping the robot with two manipulators on its calves and integrating its original legs, we achieved 6D pose manipulation."
During a series of tests, the researchers concluded that the LocoMan could open doors, plug electronics into sockets and pick up objects in confined spaces, among other tasks.
The LocoMan is detailed in the article, “LocoMan: Advancing Versatile Quadrupedal Dexterity with Lightweight Loco-Manipulators,” which appears in the journal arXiv.


