A robot for inspecting and mapping tiny spaces
Marie Donlon | September 20, 2023A team from Worcester Polytechnic Institute in Massachusetts has developed a prototype of a slender and deformable robot that can fit itself into tight spaces to perform building inspection and mapping tasks, among others.
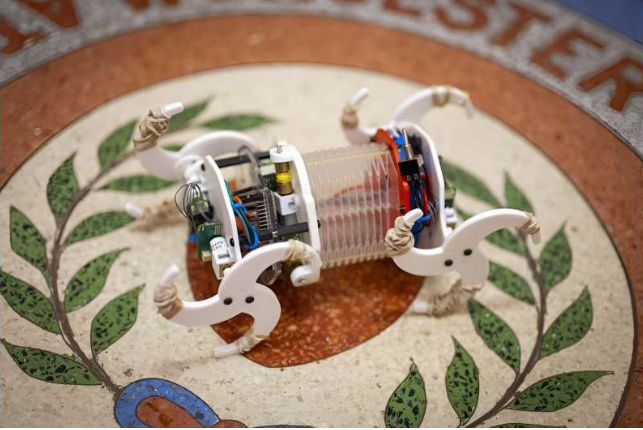
According to its developers, the origami-inspired robot is composed of plastic, metal, 3D-printed and laser-machined parts, custom circuit boards, a miniature computer, sensors and motors. The developers suggest that the size and shape of the prototype robot enable it to maneuver into the nooks and crannies of buildings as well as navigate within walls, above drop ceilings and in ductwork.
 Source: Worcester Polytechnic Institute
Source: Worcester Polytechnic Institute
Outfitted with cameras and sensors that measure temperature and contaminant levels, the robot can reportedly operate autonomously via artificial intelligence (AI). Furter, it can map the locations throughout a structure as well as collect important data.
The researchers explain that the robot's separate steering and propulsion systems enable it to deform its body to fit into small spaces where it can travel both vertically and horizontally. Additionally, the robot can overcome obstacles like steps or gas, and navigate through mazes, making it appropriate for operating within pipe networks for instance.
“Some of these places the robot can get into are not ideal for worker health,” the researchers explained. “One of our priorities is to design for the safety of people who would be using this robot.”



