Watch these insect-inspired robots jump
Marie Donlon | February 06, 2023Researchers from the University of Illinois Urbana-Champaign and Princeton University have developed tiny insect-sized jumping robots.
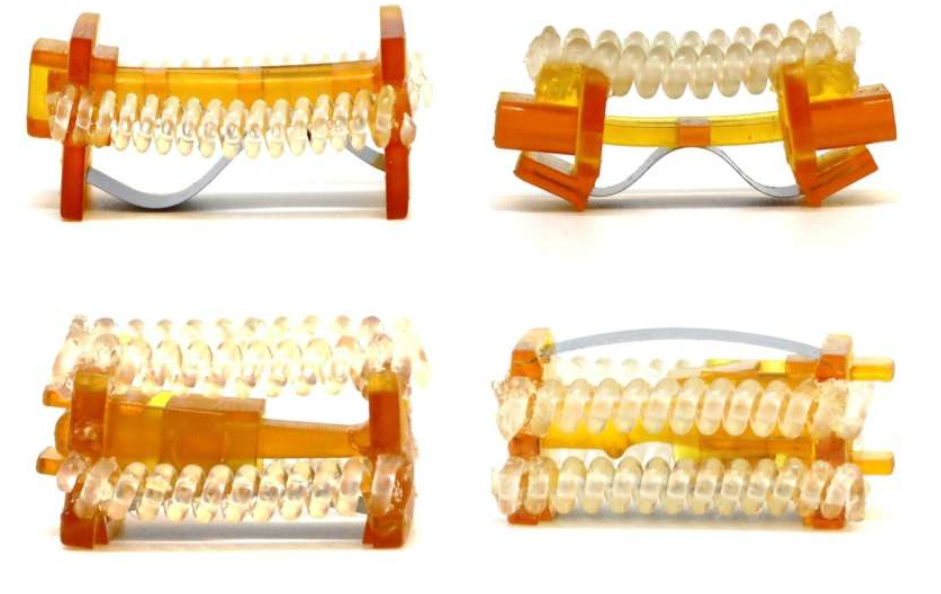
The researchers were able to mimic so-called snap buckling in beetles wherein a rapid release of elastic energy occurs when a coiled muscle within a click beetle’s thorax is triggered, enabling the beetle to propel itself great distances into the air.
 Source: Yuzhe Wang
Source: Yuzhe Wang
To achieve this, the team employed tiny, coiled actuators that tug on a beam-like mechanism in the tiny robot. According to the developers, this causes the beam to buckle slowly, storing elastic energy until it is then released and amplified spontaneously, rapidly moving the robot forward — a process dubbed dynamic buckling cascade.
The researchers suggest that the tiny robots capable of such movement could one day be used for applications such as inspecting crops or performing maintenance and inspection tasks on large machines such as jet engines and wind turbines.
The researchers detailed their findings in the article, Insect-scale jumping robots enabled by a dynamic buckling cascade, which appears in the journal Proceedings of the National Academy of Sciences.
For more on the jumping beetle-inspired robots, watch the accompanying video that appears courtesy of Proceedings of the National Academy of Sciences.



