How to reduce stepper motor noise and vibration in motion control
Ryan Clancy | March 07, 2021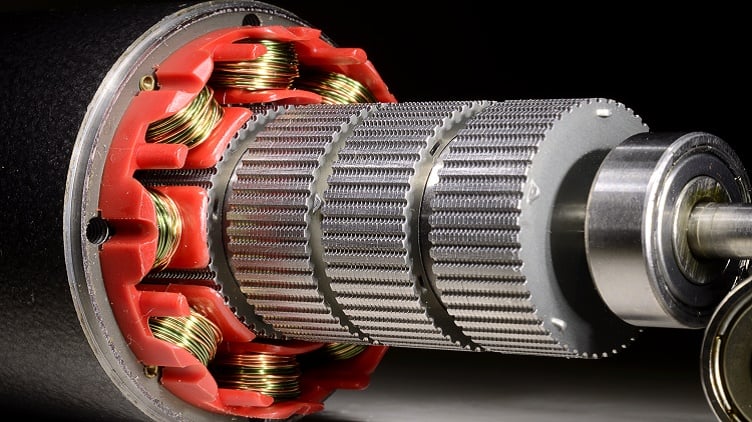 The internals of a stepper motor showing its microsteps. Source: Giedrius/Adobe Stock
The internals of a stepper motor showing its microsteps. Source: Giedrius/Adobe Stock
Stepper motors are ubiquitous in the engineering field, as they have many distinct advantages over brushless DC (BLDC) and regular DC motors. Bipolar stepper motors give precise open loop positions and provide zero-speed torque without needing external sensors or using a control loop. Stepper motors control their stepping capabilities very well and this allows them to be used in many applications in the motion control field, such as in 3D printers, textile manufacturing equipment, closed-circuit TVs (CCTV), pick and place machines and computer numeric control (CNC) systems.
While a wide range of industries utilize stepper motors, these systems can be prone to common issues with current distortion and torque ripple. Successful operation depends on the effective and efficient management of the noise and vibration generated by stepper motors. When these motors are used in CCTV, vibration caused by the zooming and panning of the camera can cause movement in the gimbal and image sensor, leading to distorted images and less than desirable performance. The same concept applies to 3D printing, where high torque ripple or motor resonance can lead to printing “artifacts” in the form of unwanted extra material on the printed object. In these and most applications, reducing the vibration of the motor itself can only be beneficial as it improves the quality of the final product produced by the machine and ensures quieter operation.
Before diving into how to solve these problems, what causes this vibration and noise from stepper motors must first be identified. To do this, let's break down how a stepper motor works.
Stepper motor operation
Bipolar stepper motors are DC motors with discrete pole positions made up of many coils laid out in two groups named phases. The rotor is positioned between windings according to the current ratio between its two poles. Due to this unique setup, stepper motors can divide their position between their two poles into smaller distances called microsteps.
Torque ripple occurs during operation when torque is not constant, and the motor can experience significant vibration and audible noise. If the motor is not operating at resonance, torque ripple will be the largest source of noise and vibration from a stepper motor.
How are they controlled?
The most common way to control a stepper motor is by current control, specifically pulse-width modulation (PWM). Utilizing this method, the controller chops the output, which limits the current in each of the two windings. This maintains the position of the rotor by defining the ratio between the windings as mentioned previously.
The first method for reducing noise and vibration in stepper motors lies within its control system. The PWM current control method naturally results in current ripple, due to the inductance of the motor and voltage running across it. The controller for the motor can attempt to minimize the ripple experienced by managing how the current is decreased. It achieves this by implementing multiple decay modes. The two modes of decay are drive synchronous fast decay and synchronous slow decay, which can be used in combination with each other to reduce current ripple.
Noise and vibration reduction methods in stepper motors
There are many ways to reduce vibration in stepper motors. In general, the methods can be segregated into mechanical and electrical methods, with the above example of current ripple reduction falling into the electrical category. First, we will go through the most used mechanical methods to reduce vibration and noise.
1. Clean damper
One of the simpler ways to minimize vibration in stepper motors is to install a clean damper. This damper is fastened to the rear shaft of the motor, and consists of hermetically sealed cases made of plastic and an inertia body with silicon gel packed inside. The added silicon gel and inertia help the motor to absorb vibration and provides a reliable damping effect.
2. High-resolution stepper motor
High-resolution stepper motors feature a higher number of rotor teeth, for example,100 teeth instead of 50. The higher the number of teeth increases the full-step resolution and helps to reduce vibration as the motor is moving a shorter distance with each step. These high-resolution motors can be adjusted to be even more accurate by microstepping or gearing, both of which are covered below.
3. Five-phase stepper motor
Five-phase stepper motors work in a similar way to high-resolution motors, as they also achieve finer full-step resolution and therefore reduce vibration. Five-phase stepper motors have 10 stator poles compared 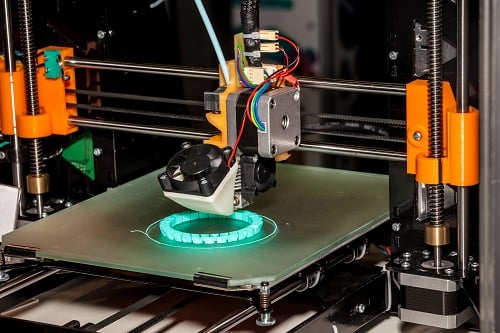 Stepper motors provide the precision movement required for 3D printers. Source: prescott09/Adobe Stockto two-phase motors, which have eight. This increases the steps per revolution from 200 to 500. High-resolution five-phase stepper motors offer increased accuracy again over standard five-phase motors.
Stepper motors provide the precision movement required for 3D printers. Source: prescott09/Adobe Stockto two-phase motors, which have eight. This increases the steps per revolution from 200 to 500. High-resolution five-phase stepper motors offer increased accuracy again over standard five-phase motors.
4. Geared stepper motors
Gearheads (not the automotive enthusiasts) are used to increase torque while reducing the motor speed. The friction of the gears can help reduce undershooting and overshooting in stepper motors and provide more stable operation with consistent torque output.
5. Correctly size motor
Trial and error while finding that “sweet spot” for motor operation can be very beneficial. It is always a bad idea to expect a motor to run at full capacity. It is equally detrimental to motor operation to oversize the motor too much, as excessive torque will result in an increase in vibration. A thorough analysis of motor requirements and specifications will guarantee better long-term performance.
There are also a couple of ways to reduce vibration and noise electrically or with a driver for stepper motors.
1. Microstepping driver
Microstepping would likely be the most recommended method to reduce vibration in stepper motors. Drivers are used here to divide the motor’s current between phases. This allows the driver to precisely control the amount of torque and position, and this control is used to greatly reduce vibration, torque ripple and audible noise.
2. Resolving vibrations independently
Specific drivers can provide low vibration performance at all speeds by resolving each vibration type independently. This is possible due to individual phase current detectors, which allow the driver to regulate current extremely well and ensure a very uniform waveform.
Have any experience with stepper motors? What has been the best way to reduce vibration and noise, if so? Be sure to discuss in the comment section below!


