Researchers develop small, tennis-ball sized surgical robot
Marie Donlon | August 25, 2020Researchers from the Wyss Institute at Harvard University and the Sony Corporation have developed a tennis-ball-sized surgical robot inspired by origami.
Designed to reduce the size of surgical robots, which often take up considerable space in the operating room, the researchers created a miniature remote center of motion manipulator (the "mini-RCM"), which successfully performed a simulated surgical task.
To build the surgical robot, researchers deposited materials layer by layer on top of each other, bonding them together and then laser-cutting them in a parallelogram design to achieve a three-dimensional shape. The team then created three linear actuators (mini-LAs) to control the robot.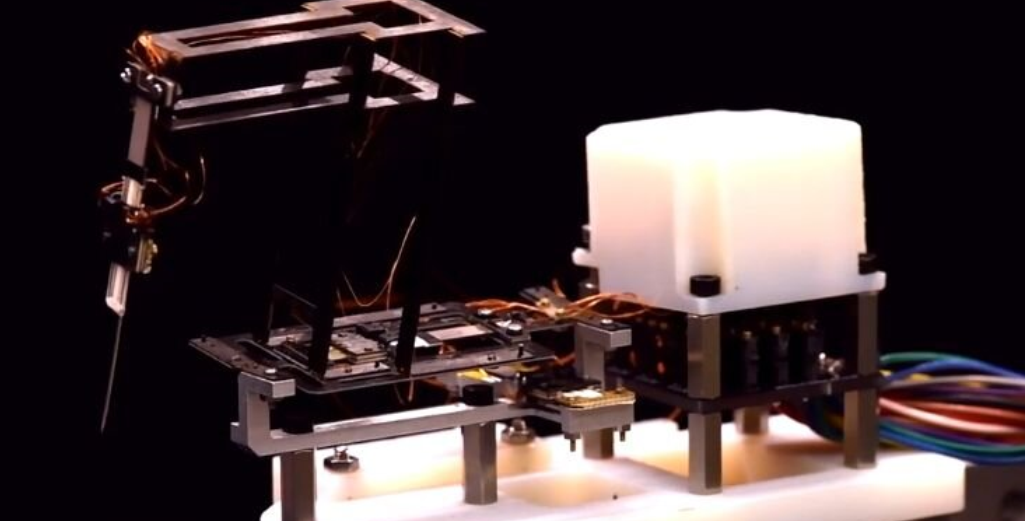 Source: Wyss Institute
Source: Wyss Institute
To simulate teleoperated surgery, the mini-RCM was connected to a Phantom Omni device, which responded to the movements of a user's hand while controlling a pen-like tool. During an evaluation of the device, participants traced a tiny square while looking through a microscope — tracing it by hand, or tracing it using the mini-RCM. According to their findings, the mini-RCM tests improved user accuracy and reduced error by 68% compared to manual attempts.
Researchers then developed a simulation of a retinal vein cannulation wherein surgeons insert a needle through the eye to inject therapeutics into the eyeball’s veins. During testing, the team punctured a silicone tube roughly the size of a retinal vein (which is around twice the thickness of a strand of human hair), with a needle attached to the mini-RCM without damaging the model.
The research is detailed in the journal Nature Machine Intelligence.