Overrange: A crucial rotary torquemeter parameter
May 01, 2024Definition
A torquemeters’ overrange is the highest torque at which measurement error is less than 0.1% of full scale. Himmelstein expresses overrange as a percentage1 of full scale. A torquemeter must have an acceptable overrange rating to be error-free over its entire operating range. If not, when installed in a driveline, large errors can occur. Note: overrange of an mV/V output torquemeter is the lesser of its overload rating and the overrange of its external signal conditioner; unless it is adequate, large measurement errors will occur.
Background
Rotary power producing and consuming devices produce (or absorb) torque in a pulsating rather than a smooth manner. That’s because they have discrete poles or pistons and gear meshes that generate complex forcing functions. Furthermore, drivelines consist of several inertias and torsion springs which resonate2 at one or more frequencies. As a result, even under “constant load,” real-world driveline torque is never constant. Instead, it consists of an average torque with one or more superimposed torsional components.
Torquemeter range selected for “best accuracy”
Figures 1 and 2 show the response of two torquemeters each with 0.1% combined error. Both torquemeters have a full scale rating equal to the engines rated (average) torque; the generally accepted condition for assuring best accuracy.
Figure 1 torquemeter has 150% overrange, Figure 2 torquemeter has no overrange. Both monitor the same driveline, which has a torsional resonance at 45 Hertz (2,700 rpm) with peak amplitude equal to half the average torque.
The torquemeter with 150% overrange measures peak and average torques without error. The torquemeter without overrange has a 16% error for average torque and a 33.3% error for peak torque. That device incorrectly reports the engine power and related driveline stresses to be much lower than actual. Substantial, unacceptable real-world errors occur despite a torquemeter combined error specification of 0.1% and with the range selected for best accuracy.
The magnitude of such errors are a function of system overrange, the amplitude of dynamic torque perturbations and the average torque level. Table 1 illustrates the effect of overrange and dynamic torque peak when the average torque is at full scale; the generally accepted condition for best accuracy. Note, the no overrange device has an unacceptable error even with a dynamic torque peak as low as 10% of full scale.
Torque measurement systems without overrange
Many commercial torquemeters, signal conditioners and most computer data acquisition cards have little or no overrange. Table 2 shows their overrange errors. As noted, such devices operating at full scale have large errors even with small dynamic torques. Unless operated downscale, a no overrange device has much larger errors when higher dynamic peak torques are present. To avoid such errors, the torquemeter can be greatly oversized. Oversizing increases temperature, linearity and hysteresis errors, and has other detrimental effects. Adequate overrange is the solution, torquemeter oversizing is not.
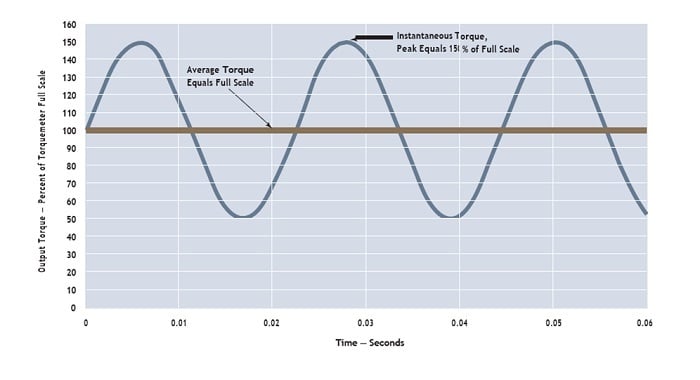 Figure 1: Torquemeter with 150% overrange drive has 45 HZ torsional at ±50% of full scale. Source: S. Himmelstein
Figure 1: Torquemeter with 150% overrange drive has 45 HZ torsional at ±50% of full scale. Source: S. Himmelstein
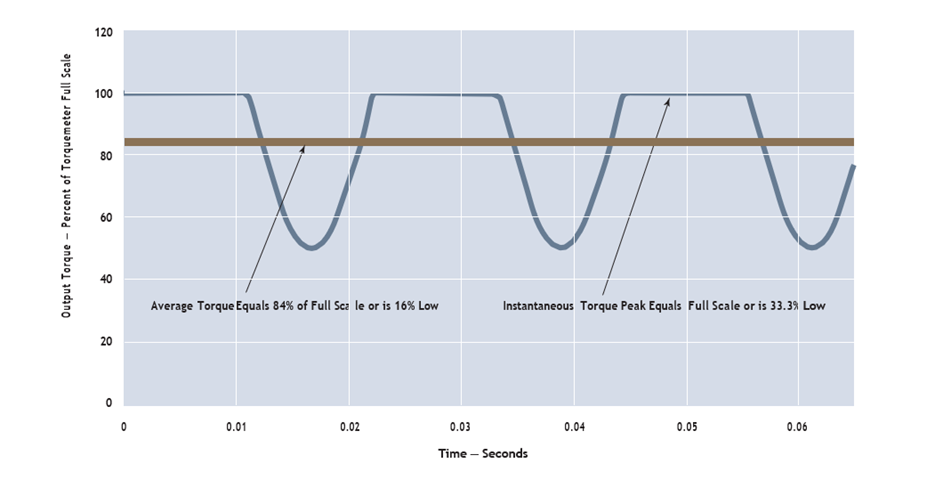 Figure 2: Torquemeter without overrange drive has 45 HZ torsional at ±50% of full scale, which results in large errors. Source: S. Himmelstein
Figure 2: Torquemeter without overrange drive has 45 HZ torsional at ±50% of full scale, which results in large errors. Source: S. Himmelstein
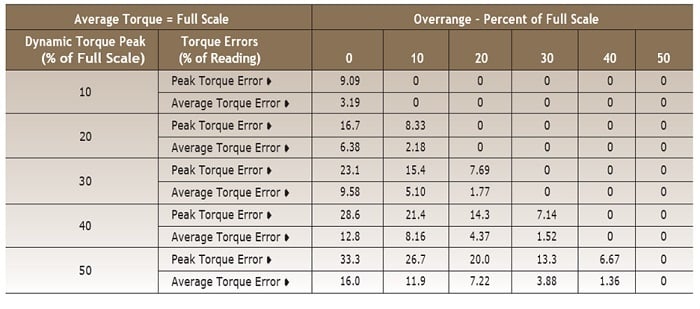 Table 1: Overrange and dynamic torque peak when the average torque is at full scale. Source: S. Himmelstein
Table 1: Overrange and dynamic torque peak when the average torque is at full scale. Source: S. Himmelstein
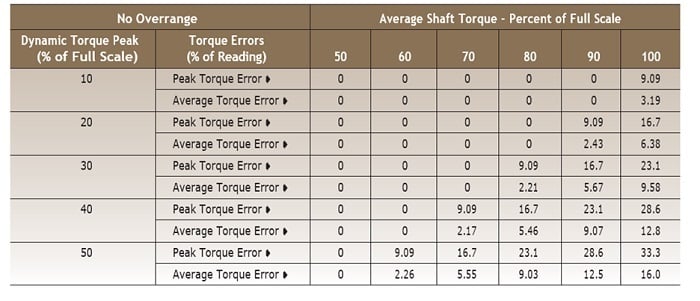 Table 2: Overrange errors. Source: S. Himmelstein
Table 2: Overrange errors. Source: S. Himmelstein
 Table 3: Cataloged Himmelstein torquemeters have overload ratings between 200% and 1,000% of full scale. Source: S. Himmelstein
Table 3: Cataloged Himmelstein torquemeters have overload ratings between 200% and 1,000% of full scale. Source: S. Himmelstein
Avoiding fatigue failures
A torquemeter’s overload rating is the maximum torque that can be applied without yielding its element or otherwise producing a permanent change in its performance. Overload is usually specified as a percentage of full scale. Cataloged Himmelstein torquemeters have overload ratings between 200% and 1,000% of full scale.
Repeated torque cycles can cause a fatigue failure when torque peaks are less than a torquemeter’s overload rating. Cataloged Himmelstein torquemeters have an infinite fatigue life when subjected to full torque reversals equal to half their overload rating; see Table 3. Thus, when cyclical torques are expected in the overload region, select3 a torquemeter with a 400% (or higher) overload rating. There is a Himmelstein torquemeter for virtually any level of torsional oscillations.
Conclusion
In summary, unless a torquemeter’s overrange is specified and is adequate for the driveline dynamic torques, significant real-world errors can occur no matter how impressive its other specifications are. These errors are virtually certain when using a torquemeter, signal conditioner or data acquisition card with no or little overrange.
S. Himmelstein and Company is the only manufacturer that publishes overrange specifications. Overrange of all their premium digital torquemeters is 150% to 300% of full scale, model dependent. Most DC operated analog torquemeters have 133% of full scale overrange. Their series 700 instruments have at least 150% of full scale overrange on their digital output. Their analog outputs have 164% of full scale overrange on the 5 V setting and 135% of full scale overrange on the 10 V setting. Himmelstein torquemeters and signal conditioners provide accurate shaft torque and power measurements at high average torque levels with high dynamic torque peaks present.
References
1 When first published in Himmelstein torquemeter specifications, it was [overrange torque — full scale torque]*100/[full scale torque]. That definition caused some confusion since it is not consistent with the long accepted industry standard for transducer percent overload; mathematically [torque overload value]*100/[full scale torque]. To eliminate confusion, Himmelstein has elected to make the overrange and overload definitions consistent; i.e., define overrange percentage as [overrange torque]*100/[full scale torque]. To further improve clarity, new torquemeter specifications and reprints of older specifications will also contain actual overrange torque in engineering units.
2 Technical Memorandum 8150, Avoiding the Destructive Effects of Torsional Resonance, S. Himmelstein and Company.
3 Bulletin 705D, Choosing the Right Torque Sensor, S. Himmelstein and Company.



