This monocycle robot rolls, balances on 2 tiny legs
Marie Donlon | February 12, 2024A monocycle robot prototype that features “legs” within the wheel has been developed by a team of researchers at the Kinetic Intelligence Machine (KIM) Lab at the University of Illinois Urbana-Champaign.
Dubbed RingBot, the monocycle robot prototype can reportedly move entirely without a human, thereby potentially paving the way for the development of a driverless mode of transportation in future cities.
 Source: KIM Lab at the University of Illinois Urbana-Champaign
Source: KIM Lab at the University of Illinois Urbana-Champaign
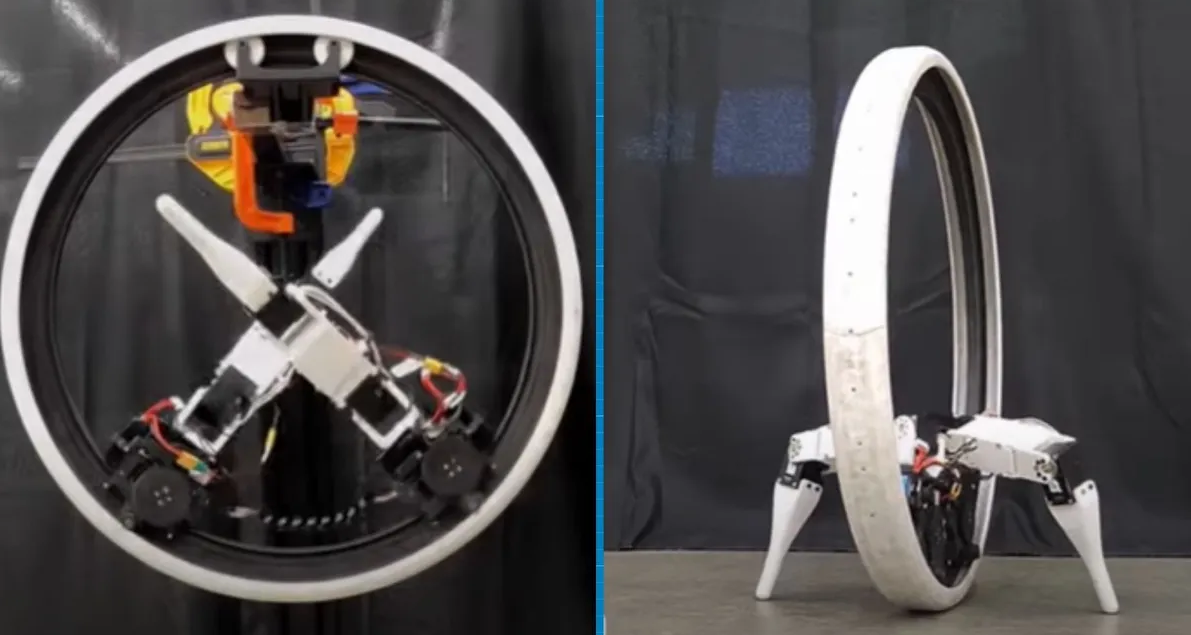
According to its developers, the RingBot includes two independent driving modules that fit within the wheel body. The researchers added that each module can control its own velocity to track its orientation and they can even make full rotations within the wheel.
Although the RingBot is still in the prototype stages, it can reportedly travel up to over three miles per hour as well as move independently without assistance for balancing or turning, due to the inclusion of the RingBot’s two tiny legs.
For instance, if the wheel loses balance and drops to one side, the two legs will emerge from the wheel and prop the RingBot up. Once it is standing, the onboard sensors confirm that the robot is stable and the legs will tuck back into the wheel while the driving modules resume their journey.
Further, the RingBot can balance itself before falling over, resuming a stable position, and can also change its direction by deploying its legs to turn around in the desired direction. Additionally, the RingBot's single-wheel design enables it to travel over smaller obstacles.
An article detailing the robot, “RingBot: Monocycle Robot With Legs,” appears in the journal IEEE Transaction on Robotics.
For more information on the RingBot, watch the accompanying video that appears courtesy of (KIM) Lab at the University of Illinois Urbana-Champaign.



