How to derate bearings based on load
Scott Orlosky | July 25, 2023
Roller bearings can be broadly classified into those that are designed primarily for an axial load, those that are designed for a radial load and those that are intended for combined loads. In the illustration below, the three main classifications of bearing types are represented along with a large blue arrow that represents the intended direction of the load that they were designed to carry.
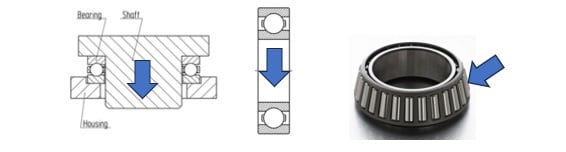 Figure 1. Three bearing load styles, from left: axial load, radial load and combined load. The first bearing in Figure 1 is intended primarily for handling a thrust load. The ball bearings are captured in such a way that increasing the axial force will increase the overall engagement of the ball bearing within the support structure. Bearings that are designed specifically for axial loading do not do well with side loading.
Figure 1. Three bearing load styles, from left: axial load, radial load and combined load. The first bearing in Figure 1 is intended primarily for handling a thrust load. The ball bearings are captured in such a way that increasing the axial force will increase the overall engagement of the ball bearing within the support structure. Bearings that are designed specifically for axial loading do not do well with side loading.
The second example shows the ball bearings are captured between an inner and outer raceway. Increasing radial force increases the engagement in the direction of the force and reduces it in the direction opposite the force. Because of the deep engagement between the two races and ball bearings in the raceway, the balls are “captured” and can therefore tolerate a small bit of axial loading, though that is usually around 10% in the simple configuration shown.
The third example shown uses a conical shape to the races and in place of ball bearings it uses tapered roller bearings. This bearing assembly is designed for combined loading and it does very well in places that have significant combined axial and radial loads. Radial ball bearings are often put into applications where they will have some component of an axial force. When significant axial force is applied, the bearing load carrying capability must be adjusted to accommodate this combined load. This is often referred to as derating the bearings.
[Learn more about roller bearings on GlobalSpec]
Typical application
Ball bearings are the most common type of high-quality bearing used in commercial/industrial applications. In the illustration on the right, the arrows point to the pair of bearings being used to hold the motor shaft in place. Despite the fact that these bearings are made to tight tolerances, there is enough variation from part to part that these bearings can slip and rattle, however slightly, as the shaft of the motor turns. To minimize this effect, the front bearing usually is epoxied in place by the outer raceway and the rear bearing is loaded with a spring washer to take up any looseness in the overall assembly. This ensures good contact all around. It is worth noting that these bearings are carrying the weight of the motor’s rotor assembly more or less evenly, ensuring that they are radially loaded as intended by the bearing manufacturer.
Creating an axial load
There are many ways to create a bearing axial load, however one of the most common is to attach a pulley to the main drive shaft of the motor. In order to prevent the pulley belt from slipping, the installer usually will try to put as much tension on the pulley belt as they can physically manage. If the pulley belt is not perfectly aligned, it can create an axial load. Other axial loads can be produced by screw-driven positioning devices, high speed fans, or liquid pumps. Not surprisingly, added axial load can affect the lifetime of the bearings. Bearing manufacturers have run lots of experiments on typical ball bearings intended for radial loads and it is common practice to express the bearing life under load in terms of number of revolutions. The term L10 for example, is shorthand to represent the number of revolutions that a statistical group of typical bearings will undergo before 10% of them fail. Each manufacturer specifies their lifetime calculations based on their own experience, so it is best to use the lifetime tables of the specific bearing manufacturer that has been specified for each particular project.
Loading and lifetimes
When specifying bearings for a certain application, the dynamic load, both radial and axial must be combined into an equivalent effective load, abbreviated as Fe. Based on test data a typical ball bearing intended for radial loads can accommodate a certain amount of side loading with no effect on the L10 life of the bearing. Without getting too math intensive in the explanation, as the axial load is increased there is no noticeable effect up to a certain point and after that point the effective load increases linearly. There are various other elements that play into the ultimate life of a bearing including the ratio of the actual radial load to the maximum rated static radial load. Since the L10 life calculation varies as the third power of the loading ratio, it is advantageous to operate significantly below the rated static load. For a typical industrial application intended to operate eight hours a day, five days a week, 20,000 hours would mean an L10 life of about 10 years which is pretty typical.
Basic principles to remember
There are three main principles worth keeping in mind when designing with radial ball bearing designs.
- For typical ball bearings, keep the axial loading below 10% of the rated radial load.
- Keep in mind that once you have reached a threshold the effective load, Fe will increase linearly as the axial load increases.
- The effective lifetime of a bearing varies as the inverse of the cube of the ratio (actual load/rated load.)
When specifying a roller bearing in a particular application, consult with the bearing manufacturer. They will know their product the best and can provide great information to help you make the most effective use of their product.
About the author
Scott Orlosky has an MS in Manufacturing and Control Theory from the University of California at Berkeley and has worked over 30 years designing, developing, marketing and selling sensors and actuators for industrial and commercial industries. He has written numerous articles and application notes for speed and position sensors used in industrial and hazardous area environments including an author credit in “Encoders for Dummies.” Scott authored an industrial newsletter for nearly 15 years and is also co-inventor on a number of patents involving design and manufacturing of inertial sensors.



