Watch this robotic arm grasp a range of objects
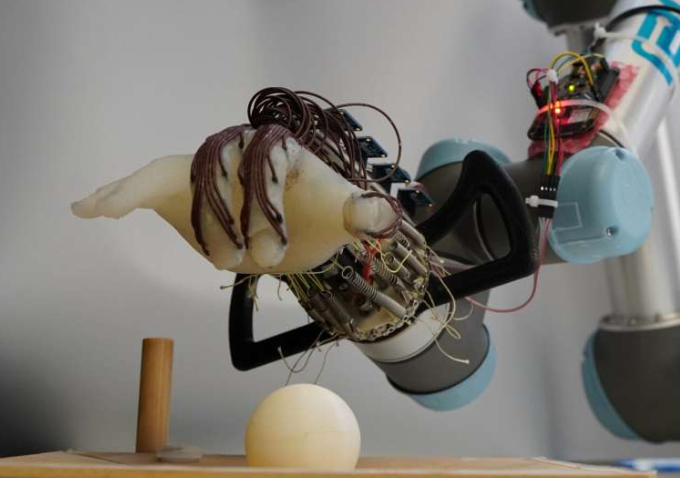
Marie Donlon | April 20, 2023A team of researchers from the University of Cambridge has created a soft, 3D-printed robotic hand capable of grasping a range of objects without dropping them via the movement of the robot’s wrist and the feeling in its "skin."
According to the University of Cambridge team, the robotic hand is easier to train because it cannot independently move its fingers. This passive movement reportedly enabled researchers to better control the robot versus training robots featuring fully motorized fingers.
 Source: University of Cambridge
Source: University of Cambridge
The researchers reportedly accomplished what has evaded earlier attempts at creating grasping robotic hands: a robotic hand that can grasp a range of objects using the appropriate amount of pressure while simultaneously using a minimal amount of energy.
Using a 3D-printed anthropomorphic hand capable of passive wrist movements and featuring implanted tactile sensors that enable the hand to sense what it is touching, the researchers trained the hand to grasp small objects like 3D-printed plastic balls without dropping them.
"This kind of hand has a bit of springiness to it: it can pick things up by itself without any actuation of the fingers," explained the researchers. "The tactile sensors give the robot a sense of how well the grip is going, so it knows when it's starting to slip. This helps it to predict when things will fail."
Once the robot was trained via trial and error to determine the most appropriate grasp to employ in handling the 3D-printed balls, new objects were introduced including a peach, a computer mouse and a roll of bubble wrap. Tests demonstrated that the robotic hand successfully grasped 11 of the 14 objects.
An article detailing the grasping capabilities of the robotic hand, "Predictive Learning of Error Recovery with a Sensorised Passivity-based Soft Anthropomorphic Hand," appears in the journal Advanced Intelligent Systems.
To see the robot grasp objects, watch the accompanying video that appears courtesy of the University of Cambridge.


