Pop-Up Sensor May Help Robotic Surgery
Engineering360 News Desk | November 23, 2015Engineers at Harvard University are developing a method to build low-cost, millimeter-scale force sensors to help give surgical robot arms hand-like ability to sense and adjust force.
According to the researchers, current conventional fabrication techniques limit the complexity and sophistication of these sensors while driving up the cost of assembly and implementation. This poses a barrier to widespread adoption of force-sensing soft robotic surgical tools that can perform both minimally invasive and complex surgeries in a safe way.
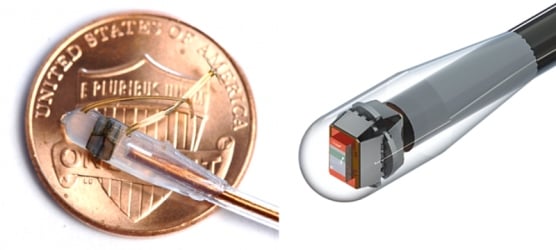 Sensor encapsulated into the catheter and (right) a rendering of the molded system. Image credit: Harvard SEAS.To solve this problem, the engineers—graduate student Joshua Gafford; Robert J. Wood, professor of engineering and applied sciences; and Conor Walsh, assistant professor of mechanical and biomedical engineering—turned to pop-up manufacturing. Inspired by origami and pop-up books, this technique fabricates complex micromachines by layering laser-cut materials into thin, flat plates that pop up into complete electromechanical devices. The team says this approach has the potential to remove the human element from the assembly process by allowing devices to "build themselves," driving down manufacturing costs.
Sensor encapsulated into the catheter and (right) a rendering of the molded system. Image credit: Harvard SEAS.To solve this problem, the engineers—graduate student Joshua Gafford; Robert J. Wood, professor of engineering and applied sciences; and Conor Walsh, assistant professor of mechanical and biomedical engineering—turned to pop-up manufacturing. Inspired by origami and pop-up books, this technique fabricates complex micromachines by layering laser-cut materials into thin, flat plates that pop up into complete electromechanical devices. The team says this approach has the potential to remove the human element from the assembly process by allowing devices to "build themselves," driving down manufacturing costs.
The sensor they manufactured via this method consists of four layers of laser-machined stainless steel sandwiched together and laminated with a flexible polyimide layer to facilitate self-assembly and copper to provide electrical contacts. When agitated in an ultrasonic bath, this 2D structure pops up into a boxy 3D sensor via an integrated spring. With a footprint of 2.7mm, the sensor is small enough to pass through the working port of an 8.6mm endoscope.
The sensor uses a principle called light intensity modulation (LIM) to sense force at the millinewton level. LIM works by connecting a light emitter and a light detector with an elastic element. When force is applied, the elastic element deforms, bringing the emitter and detector closer together. The change in irradiance sensed by the detector can be translated into applied force.
The next step in the research, says Gafford, is to make the sensor smaller and more robust, eventually providing flexible surgical robots with a sense of "touch." According to Wood, the ability to rapidly and inexpensively create millimeter-scale surgical tools with embedded sensors and actuators has potential applications in laparoscopy and endoscopy.



