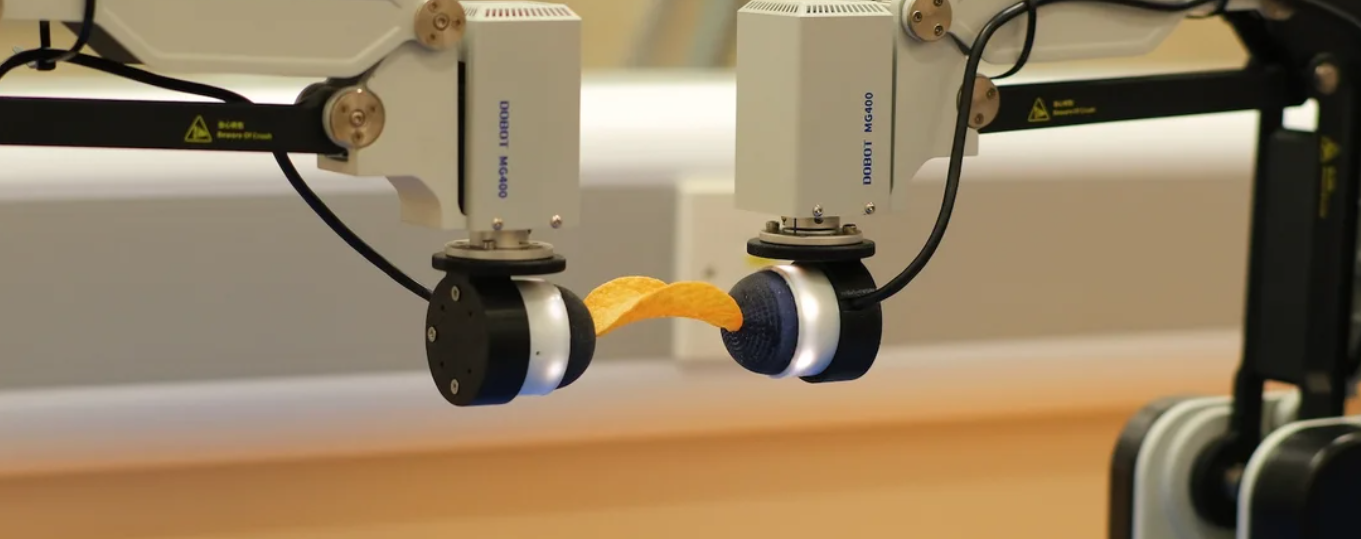
These robotic arms can pick up individual Pringles
Marie Donlon | August 29, 2023A team of researchers from the University of Bristol in the U.K. has developed an artificial intelligence (AI)-driven bimanual robot that responds to real-time tactile feedback so much so that it can precisely pick up delicate objects like individual Pringles chips without breaking them.
The “Bi-Touch” system of robotic limbs is reportedly directed by AI to “solve tasks even under unexpected perturbations and manipulate delicate objects in a gentle way.”
 Source: University of Bristol
Source: University of Bristol
While this system employs two limbs versus the typical one limb, its developers suggest that training the system for certain tasks takes just a few hours. Initially, the researchers explained, the AI is trained in a simulation environment, and the finalized Bi-Touch system is then applied to their physical robot arms.
“With our Bi-Touch system, we can easily train AI agents in a virtual world within a couple of hours to achieve bimanual tasks that are tailored towards the touch,” the researchers added. “And more importantly, we can directly apply these agents from the virtual world to the real world without further training.”
To train the Bi-Touch system, the researchers used deep learning reinforcement, wherein robots perform tasks via trial-and-error experimentation and are subsequently rewarded with a note if successful. Eventually, the AI understands what steps to perform to achieve its goal. During training, that goal involved using its two limbs — each of which is capped with a single, soft pad — to handle objects including a foam brain mold, a plastic apple and a single Pringles chip. According to its developers, this was accomplished without any visual inputs, and relied entirely upon proprioceptive feedback — for instance, force, physical positioning and self-movement.
Its developers envision that the Bi-Touch system could one day be used in industries such as fruit-picking, domestic services and to potentially restore touch sensations in artificial limbs.
An article detailing the system, “Bi-Touch: Bimanual Tactile Manipulation With Sim-to-Real Deep Reinforcement Learning,” appears in the journal IEEE Robotics and Automation Letters.


