New robotic hand identifies objects in its grasp
Marie Donlon | April 04, 2023Engineers from Massachusetts Institute of Technology (MIT) have developed a robotic hand capable of identifying objects based on grasp.
Using high-resolution touch sensing, the robotic hand reportedly identifies objects accurately after grasping them just once.
 Source: MIT
Source: MIT
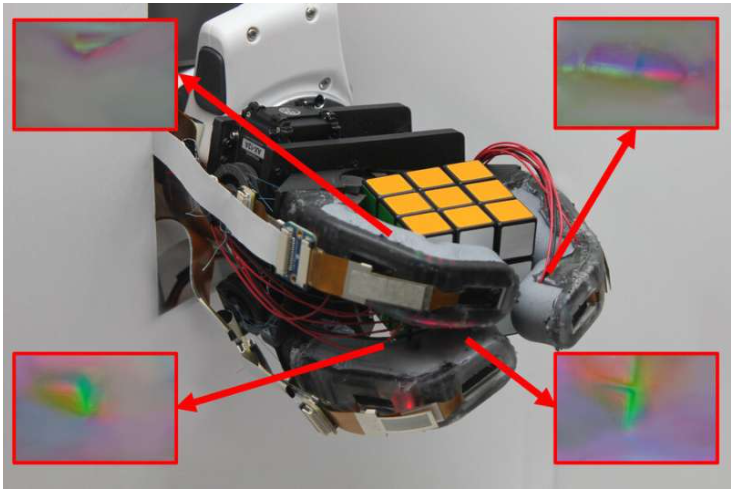
To accomplish this, the MIT team first created a robotic finger composed of a rigid skeleton encased in a soft outer layer of transparent skin embedded with several high-resolution sensors equipped with a camera and LEDs for capturing visual information about an object's shape.
Specifically, the endoskeleton of the robotic finger features detailed touch sensors — dubbed GelSight sensors — that are embedded into the top and middle sections of the finger below the transparent skin. To ensure continuous sensing along the length of the finger, the sensors are placed so that the range of the cameras overlaps. As such, once the robotic finger grasps an object, the camera captures images while the LEDs illuminate the skin and an algorithm conducts backward calculations, mapping the contours of the grasped object's surface.
According to the MIT team, the design was used to develop a three-fingered robotic hand capable of identifying objects after one grasp with a reported 85% rate of accuracy.
The researchers suggest that the robotic arm’s soft and rigid elements enable it to grasp both heavy and pliable objects, much like human hands, which would make them potentially appropriate for the development of at-home care robots, for instance.
The robotic hand is detailed in the article, “GelSight EndoFlex: A Soft Endoskeleton Hand with Continuous High-Resolution Tactile Sensing,” which appears in the journal arXiv.


