Robot mimics krill in underwater environments
Marie Donlon | March 09, 2022Researchers from Brown University and Universidad Nacional Autonoma de Mexico have developed a krill-inspired robot for data collection and exploration applications.
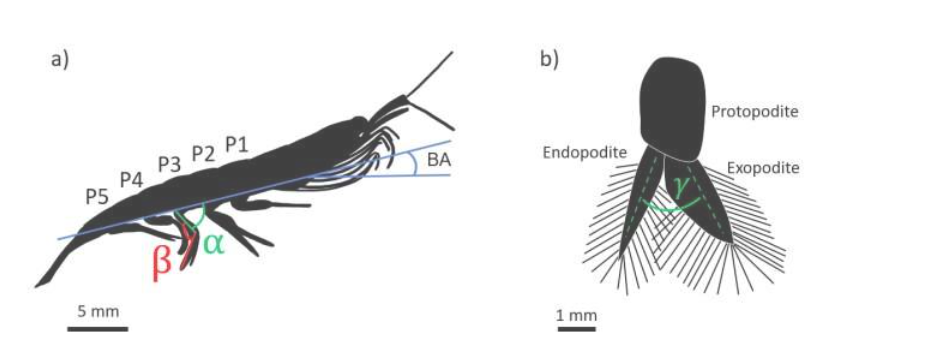
The so-called RoboKrill is inspired by the shrimp-like crustacean species that move around seamlessly underwater. To achieve the swimming behaviors of krill, the team mimicked the krill’s swimming kinematics — otherwise known as the motion of objects without reference to the forces that cause the motion.
 Source: Oliveira Santos et al.
Source: Oliveira Santos et al.
In the lab, researchers achieved the desired speed and kinematics with the RoboKrill and expect to eventually use the robot to explore marine environments. Likewise, the team expects to create swarms RoboKrill that work together to collect and gather data.
"We will now be studying the effects of semi-kinematic morphological features and the dynamic interactions in the generation of thrust and optimizing important parameters to develop a simplified system that we can then miniaturize or scale down," explained the researchers. "Our ultimate goal is to then engineer a small system that we can use, for example, to sense or intervene in different compact environments."
The RoboKrill robot is detailed in the article, RoboKrill: A metachronal drag-based swimmer robot, which appears in the journal arXiv.



