Automotive Innovation Predicts Changes in Pedestrian Movement
Engineering 360 News Desk | October 15, 2015Hitachi Automotive Systems and Clarion Co. say they have developed technology that prevents auto-pedestrian collisions by predicting changes in pedestrian movements and calculating optimum speed patterns in real time. The technology has been verified for implementation at safe and practical driving speeds using experimental vehicles, a statement says.
The companies say that successful autonomous driving depends on the recognition of various kinds of obstacles and moving objects including vehicles and pedestrians. Predicting their movements and potential changes in their movements using a real-time implementation of a driving plan to prevent collisions is a necessary step.
Features of the Hitachi/Clarion technology include:
Speed control based on prediction of change in movement – The technology predicts future movements based on the positional relationships of 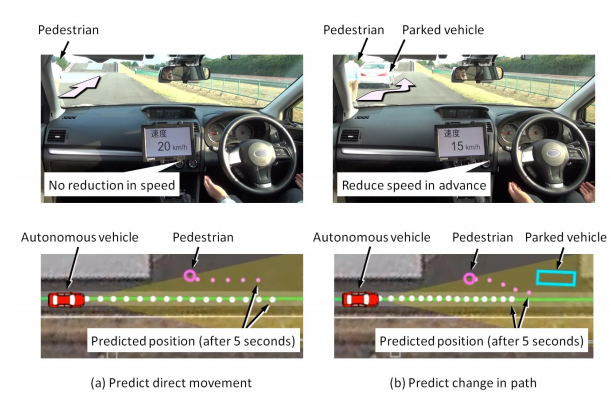 Speed control based on prediction of pedestrian movement (Upper photo: Experimental vehicle, Lower photo: Predictive control information) Credit image: Hitachimoving objects with obstacles. The technology models the change in movement involved in changing paths toward a space with low-risk potential when pedestrians try to avoid parked vehicles and other obstacles. The best speed pattern is calculated to minimize changes in acceleration, maintaining a practical speed without decelerating when safety can be maintained.
Speed control based on prediction of pedestrian movement (Upper photo: Experimental vehicle, Lower photo: Predictive control information) Credit image: Hitachimoving objects with obstacles. The technology models the change in movement involved in changing paths toward a space with low-risk potential when pedestrians try to avoid parked vehicles and other obstacles. The best speed pattern is calculated to minimize changes in acceleration, maintaining a practical speed without decelerating when safety can be maintained.
High-speed calculation of optimum speed – When there are multiple moving objects and obstacles, maintenance of safety and practicality of speed must be considered. Rapid calculations are necessary to establish optimum speed values. The technology provides rapid access to the memory storing the collision probability map, reducing calculations necessary to establish optimum values. The path plan for the autonomous vehicle is fixed in advance, and a 1D map that omits road-width information is used, enabling high-speed access to memory. The companies say this effect was validated using an FPGA test board to verify that calculations can be increased by up to 200x faster than with software processing using generic embedded processors.
Tests results show that it is possible to achieve practical speeds for passing through pedestrians and driving within the standard comfortable speeds for acceleration and for change of acceleration. Further tests using experimental vehicles in different driving environments will be conducted, the companies say. The technology was developed with the cooperation of the Pongsathorn Laboratory of the Department of Mechanical Systems Engineering, Faculty of Engineering, Tokyo University of Agriculture and Technology.
News Articles:
Automatic Emergency Braking Promised by 10 Automakers
Collision Avoidance System Offered for Consumer Drone Market



