How to specify encoder cables
Kenneth Dickinson | July 27, 2020Signal quality is a huge factor in the reliability of an encoder’s performance. It is essential to match the signal cable with the requirements of an application. Proper encoder wiring is key to building a long-lasting, reliable machine. To specify the best encoder cable for an application, factors such as output type required and cable length should be considered.
An encoder cable transmits encoder output, which may include multiple channels, to a control device. Long transmission runs, high cable capacitance and extreme EMI can contribute to the degradation of encoder cable signal transmission. Properly specified, an encoder cabling can compensate for all three of these issues.
 Figure 1: Variations of cables and connectors used to transmit signals to and from encoder devices. Source: Dynapar
Figure 1: Variations of cables and connectors used to transmit signals to and from encoder devices. Source: Dynapar
Encoder wiring scheme considerations
The encoder type determines how many wires are necessary for the sensor to communicate with the readout device (controller, drive, counters/display). The wiring scheme of incremental encoders is straightforward. Typically, one wire for power, one wire for ground and one wire for each additional channel will be necessary. However, incremental encoders are available in a variety of types, including:
- Single-channel encoder designs (A channel) to track speed and displacement
- Quadrature encoder designs (A and B channels), which also track direction
- Quadrature encoder designs with an additional index channel (Z channel) to establish a home position once per revolution
- Encoders with additional commutation tracks (U, V and W channels)
With a wide variety of application needs, there is an equally broad selection of encoder devices. Some may involve a differential line driver to generate two outputs for each channel: the normal signal and its complement. Noise spikes appear in both signals and are filtered out by the receiver as common-mode noise. Implementing this scheme requires two wires for each channel.
Achieving successful communication
An encoder’s voltage quality to the receiver determines its ability to drive communication successfully. For instance, when a readout device uses more sophisticated techniques, such as edge detection on a quadrature encoder, the signal should consist of square pulses with a good signal-to-noise ratio. Along with voltage quality, the voltage level of the pulse should also be considered. Drives and controllers have thresholds for voltage detection and will not detect a pulse lower than the specified voltage level.
Applying proper cable grounding techniques is critical to achieving optimal signal quality. Between the encoder case and the encoder cable/connector, only one device should be grounded. While this may seem obvious, it is not uncommon that both ends of a cable are mistakenly grounded. Grounding at multiple points can create ground loops, leading to AC-induced noise. To avoid these and other issues, ground the cable through the connector, ideally on the drive side, assuming the drive is grounded. Notably, it is okay to have a “loose end.” In fact, a loose end should appear on one side of the cable.
Long cable run considerations
Two of the most common factors that play into the degradation of signal quality are transmission distance and noise environment. Capacitance, inductance and resistance can cause a voltage drop in electrical cables.
For long cable runs, it is important to specify a cable with the lowest capacitance possible. High cable capacitance increases the current draw required from the encoder’s output circuity and can increase the time needed to charge the cable. This delay can increase the rise time of the signal and distort the encoder pulse (see Figure 2 below).
While low capacitance cables are often expensive, improper selection can result in a weak encoder signal over long cable runs, no matter how powerful the encoder line driver. It is impossible to avoid capacitance altogether, but lower capacitance helps decrease signal loss in transit. Also, generating more current causes heating in the output driver of the encoder, forcing the encoder to thermally shut down. Long cable runs require more electric storage build up before reaching the encoder.
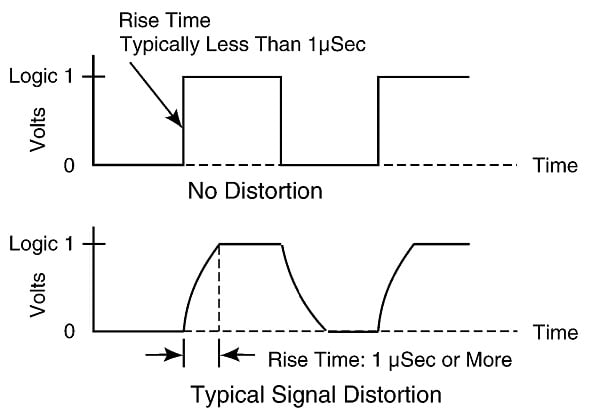 Figure 2: Illustrated above is a comparison of a rise of voltage with and without distortion. Signal distortion occurs in long cable runs when there is higher capacitance because electrical buildup takes longer. Lower capacitance cables are important to increase signal strength. Source: Dynapar
Figure 2: Illustrated above is a comparison of a rise of voltage with and without distortion. Signal distortion occurs in long cable runs when there is higher capacitance because electrical buildup takes longer. Lower capacitance cables are important to increase signal strength. Source: Dynapar
Considerations for high noise environments
Proper cabling can reduce or even suppress noise, delivering strong encoder signals even in a very noisy environment. Encoder cable shields are highly recommended, no matter the application, but especially in high noise environments. Each wire leading to an encoder should be protected individually. A foil jacket with a drain wire is the most common type of cable shielding, providing suitable performance at an economical price. To further enhance encoder performance, implement braided shielding to encoder cables if an application is in a high noise environment.
Twisted-pair wiring is another method of noise-suppression that eliminates inductance and helps prevent cross-talk. For differential encoder signals, a twisted pair of cables can carry the encoder signal and its complement. Without special consideration to encoder cabling, factors such as high-frequency and signal voltage can impact a system’s performance. For the best noise protection, the twisted pairs should be foil-wrapped individually and housed in a cable that is also protected by a braided wire shield. Extra protection can provide superior performance, even in a high-noise environment.
There are a few additional actions to take to help ensure a signal is top-notch in high noise environments. It is essential to have cable runs dedicated to encoder wiring. All cables should run perpendicular to three-phase power lines. Also, avoid running an encoder cable and motor power lines through the same conduit, if possible. Ensuring cables are not coiled up with one another is a simple way to ensure that an encoder is receiving an optimal signal.
Conclusion
While often overlooked, proper cable selection is critical to quality encoder signal output arriving at the drive or receiving device. No matter how powerful the encoder line driver, a poor encoder cable with high capacitance and improper shielding can dramatically reduce the distance a signal can travel. Specifying a quality cable with the encoder is the key to success.
About the author Kenneth Dickinson. Source: Dynapar
Kenneth Dickinson. Source: Dynapar
Kenneth is an electronic engineer with over 25 years of experience in the design and development of a variety of sensing technologies such as rotary encoders, linear encoders and other industrial sensors. Currently, Kenneth leads advanced research and development efforts with Dynapar™, where he aims to bring new and innovative sensor technology to industrial markets.
Since joining Dynapar in 2001, Ken has been a part of many other initiatives, such as magnetic encoder development. Prior to his time with Dynapar, Kenneth was with NorthStar Technology, LakeShore Cryotronics’ Industrial Division and Hitachi Metals America.



