Amsterdam's 'Roboats' provide autonomous canal transit and modular structures
Peter Brown | June 06, 2019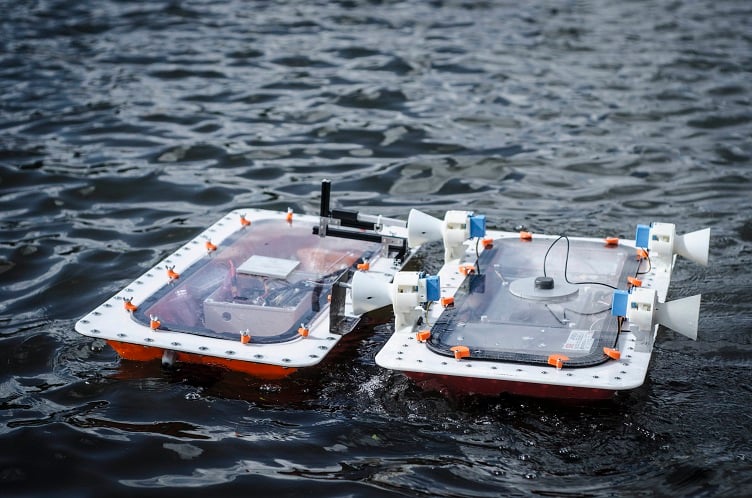 The test of the Roboat in Amsterdam's canals where two robots attach to each other. Source: MIT
The test of the Roboat in Amsterdam's canals where two robots attach to each other. Source: MIT
Amsterdam has been working on a fleet of connectable, modular, robotic boats for several years. The city, in collaboration with MIT researchers, has been working on "Roboats," consisting of vessels with rectangular hulls equipped with sensors, thrusters, microcontrollers, GPS modules, cameras and other hardware to relieve congestion in the city’s busy streets by diverting some traffic to canals.
These Roboats would provide on-demand for transportation of people and goods, and can also assemble to form foot bridges, performance stages or food markets. The robotic vessels are commanded to navigate to a location and assemble into target structures, or use the sensors to gather data on infrastructure or air and water quality. Algorithms guide the Roboats to the target location and automatically connect to an adjacent Roboat's latching mechanism.
The latching system uses both lidar and a camera, which recognizes a connection point by an augmented reality (AR) tag, which resembles a QR code. This allows the Roboats to detect and compute their 3D position and orientation relative to the tag. If a Roboat misses a latch, it reorients and tries again.
MIT tested a quarter-sized Roboat prototype around Amsterdam’s canals in 2016, which was made of low-cost, 3D-printed materials. Tests for the latching mechanism took place at an MIT swimming pool and in Boston's Charles River, where the robot boats were able to connect in about 10 seconds from roughly 1 m away.
“In Amsterdam, canals were once used for transportation and other things the roads are now used for. Roads near canals are now very congested — and have noise and pollution — so the city wants to add more functionality back to the canals,” said Luis Mateos, a graduate student and researcher in the MIT Senseable City Lab. “Self-driving technologies can save time, costs and energy, and improve the city moving forward.”
The next steps include designing full-scale Roboats to be more stable on water. Researchers are also working on tentacle-like rubber grippers that tighten around the latching pin for better connections between vessels. Also in the works is a display system that works with the AR tags to change codes, prompting the Roboats to assemble into different configurations.



