Leafbot: The soft robot revolutionizing disaster relief efforts
Marie Donlon | February 25, 2025A robot capable of traversing uneven surfaces and intended for disaster relief, pipeline inspections and precision farming applications has been developed by a team of researchers at the Japan Advanced Institute of Science and Technology (JAIST).
To develop the so-called Leafbot, the team leveraged a vibration-driven motion that enabled it to overcome obstacles with fewer control mechanisms. Specifically, Leafbot relies on its compliant structure comprised of soft materials coupled with a simple locomotion strategy to maneuver slopes and navigate obstacles.
 Source: Van Anh Ho
Source: Van Anh Ho
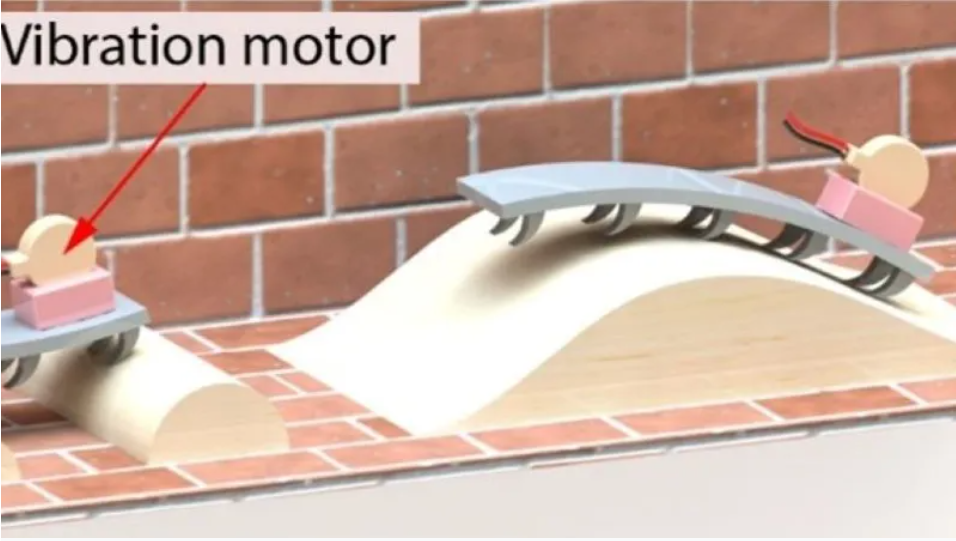
According to its developers, Leafbot is made up of soft monolithic silicone rubber and it features curved projections at its base to mimic limbs for crawling. Leafbot’s body was then affixed to a vibrating motor to enable a vibration mechanism for locomotion.
“Unlike rigid robots, which rely on precise actuation, Leafbot’s adaptability allows for self-adjustment across different surfaces. This ability makes it particularly useful for applications that require mobility in confined and uneven spaces,” the team noted.
For instance, Leafbot could potentially perform missions in disaster-stricken areas, where it might encounter fallen debris and uneven terrains. Further, the Leafbot might also be used for pipeline inspection, underground exploration, soil analysis and crop inspection, among other tasks.
The robot is detailed in the article, “Terradynamics of Monolithic Soft Robot Driven by Vibration Mechanism,” which appears in the journal IEEE Transactions on Robotics.
For more information, watch the accompanying video that appears courtesy of JAIST.



