This octopus-inspired robotic arm can grasp different objects
Marie Donlon | December 27, 2023Engineers from China’s Beihang University and Tsinghua University have created an octopus-inspired, haptically controlled robotic arm that can grasp, lift and carry objects on both land and underwater.
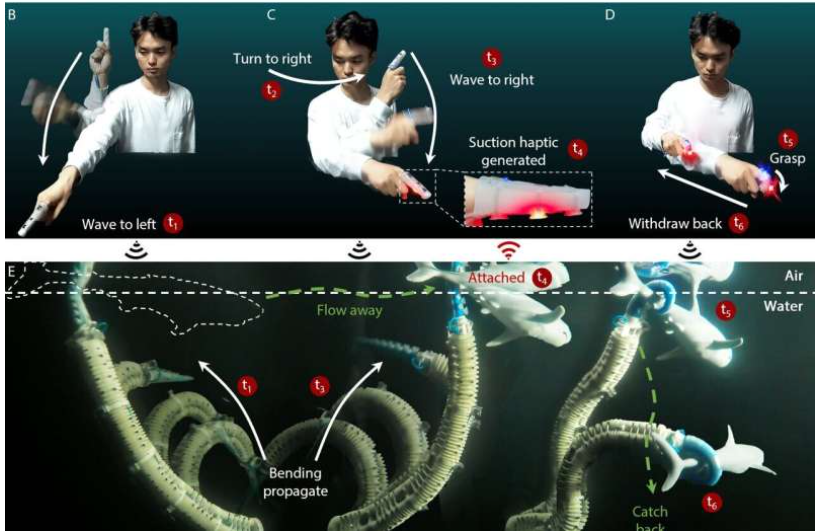
According to its developers, the octopus-inspired robotic arm resembles the real thing: a tentacle that furls and unfurls to grasp objects. The robotic arm is reportedly capable of grasping objects by applying vacuum pressure from the suction cups located on the underside of the tentacle.
 Source: Li Wen, Beihang University
Source: Li Wen, Beihang University
To enable the tentacle to curl, the engineers programmed mathematical propagation of the robotic arm’s five segments, which form a network that behaves like the nervous system of an octopus arm. Meanwhile, the researchers report that electrical messages are sent via liquid metal wires to encourage maximum flexibility.
Further, the tips of the wirelessly operated robotic arm feature both suction cups and temperature sensors to create a so-called sensory feedback system. According to its developers, the system enables the operator to feel what the robot arm has in its grasp using the tentacles’ sucker tips. Such sensations are felt by the operator through a network of tiny suction cups also embedded within the glove.
Through a series of tests, the team determined that the octopus-inspired robotic arm works well in both wet and dry environments.
An article detailing the octopus-inspired robotic arm, “Octopus-inspired sensorized soft arm for environmental interaction,” which appears in the journal Science Robotics.
For more information on the octopus inspired robotic arm, watch the accompanying video that appears courtesy of Beihang University.


