Watch as this pneumatically actuated soft robot plays the piano
Marie Donlon | July 21, 2021A team of engineers from the University of California, Riverside (UC Riverside) has developed air-powered computer memory capable of controlling soft robots.
While pneumatic soft robots that use pressurized air to move their associated limbs and grippers are nothing new, current systems for controlling these robots continue to include electronic valves and computers to maintain the state of the robot’s moving components, which are often costly, bulky and demand a significant amount of energy.
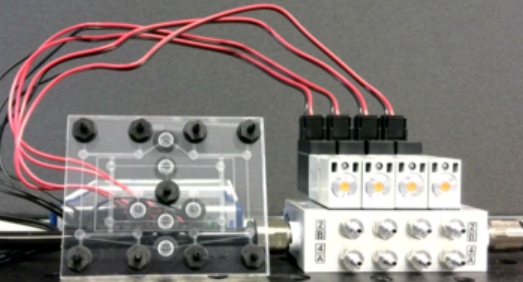 An 8-bit pneumatic RAM chip used to help a soft robot control its movements. Source: William Grover/UC Riverside
An 8-bit pneumatic RAM chip used to help a soft robot control its movements. Source: William Grover/UC Riverside
As such, the UC Riverside team determined that so-called pneumatic logic memory could be developed for soft robots, thereby eliminating the electronic memory currently in use for helping robots remember and maintain the positions of their moving components.
To accomplish this, the team devised a pneumatic random access memory (RAM) chip featuring microfluidic valves in lieu of electronic transistors. In addition to controlling the flow of liquids on microfluidic chips, the microfluidic valves can also be used to control the flow of air.
According to the developers, the valves seal against a pressure differential — even in the event that they are disconnected from an air supply line. This creates trapped pressure differentials that behave as memories while maintaining the positions of the robot’s actuators.
Once the team of UC Riverside engineers modified the microfluidic valves, enabling them to handle larger air flow rates via dense valve arrays, the team created an 8 bit pneumatic RAM chip capable of controlling larger and faster-moving soft robots. The engineers embedded the chip into a pair of 3D-printed rubber hands and varied the combinations of atmospheric pressure and vacuum within the channels on the RAM chip. In so doing, the team enabled the robot to play a song on a piano.
To see the robot hands playing the piano, watch the accompanying video that appears courtesy of UC Riverside.
An associated paper, “A pneumatic random-access memory for controlling soft robots,” appears in the journal PLOS One.



